Position Command Correction Controller and Photoelectric Tracking System
A technology of photoelectric tracking system and controller, which is applied in general control system, control/adjustment system, adaptive control, etc. It can solve problems such as inability to track slope signals, chattering, position oscillation overshoot, etc., and improve position control performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
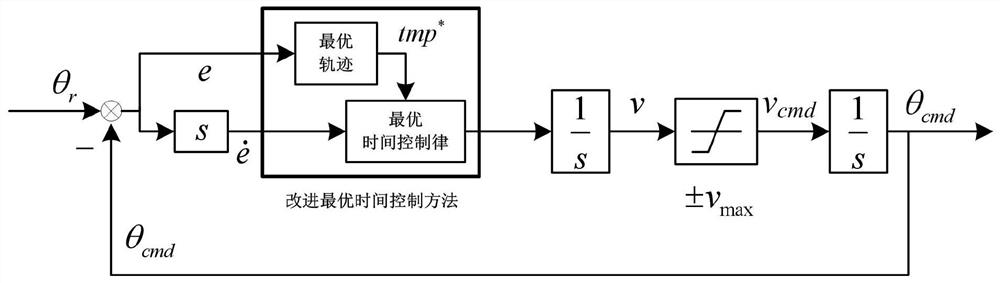
[0047] In one of the embodiments, the present invention discloses a position command correction controller, the position command correction controller is located before the position controller in the photoelectric tracking system, and is used to control the receiving speed and acceleration limit requirements of the photoelectric tracking system The given position command θ r Carry out tracking and correction, and output the corrected position command θ cmd , specifically, the position command correction controller is based on the control model of the position command correction controller and the improved optimal time control method for the given position command θ r Make fast track and fixes. figure 1 The control structure block diagram of the controller is modified for the position command, the second-order dou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



