Synchronous control method based on parallel movement of multiple hydraulic cylinders of heave compensation platform
A multi-hydraulic cylinder and synchronous control technology, which is applied in the direction of fluid pressure actuators, fluid pressure actuator system components, servo motors, etc., can solve the problem of low synchronization accuracy, great influence on the performance of the electro-hydraulic servo valve system, and uncertain parameters to reduce static error and instability, improve position control performance, and improve synchronous control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention Modifications in equivalent forms all fall within the scope defined by the appended claims of this application.
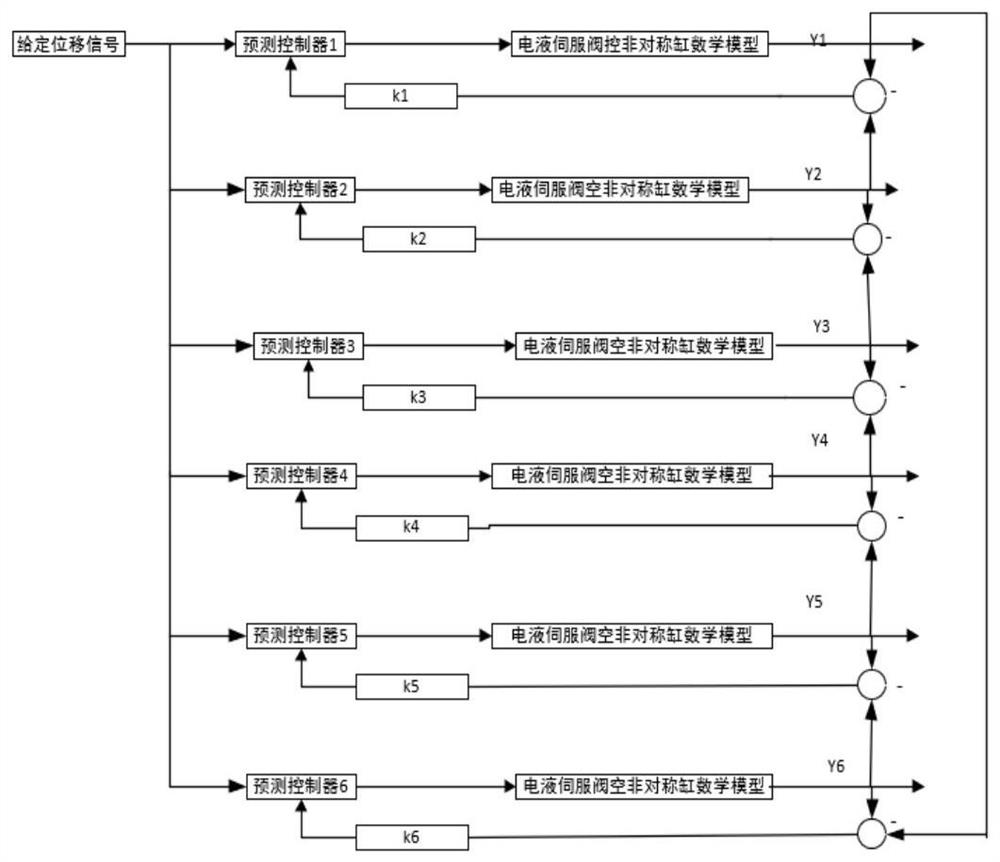
[0100] The present invention provides a synchronous control method based on the parallel movement of multiple hydraulic cylinders of a heave compensation platform, referring to figure 1 , which includes the following steps:
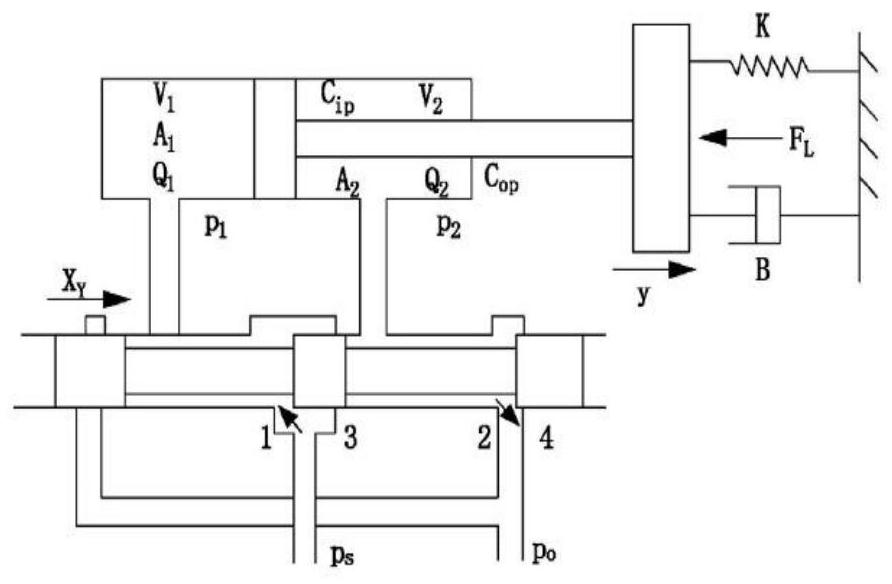
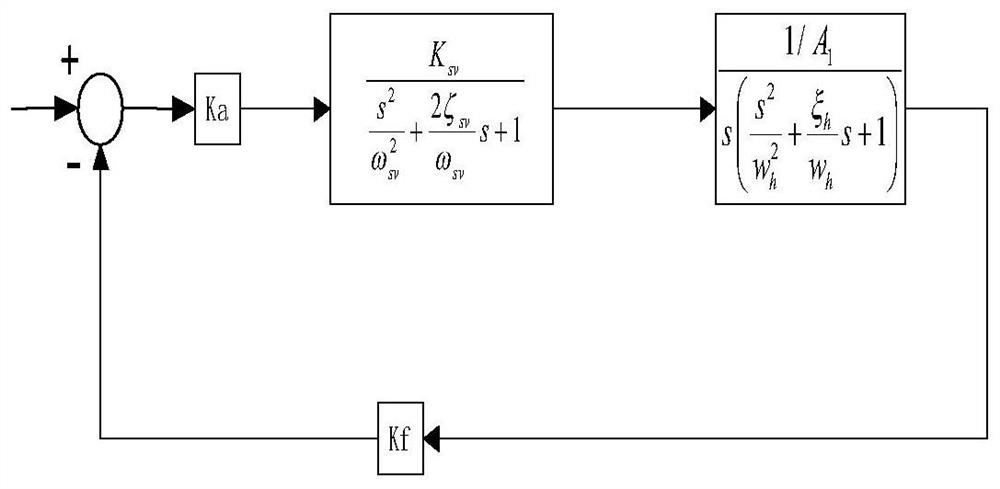
[0101] S1: Establish the mathematical model of the electro-hydraulic servo valve-controlled asymmetric hydraulic cylinder system:
[0102] Such as figure 2 and 3Shown are the schematic diagram of the structure of the electro-hydraulic servo valv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



