Industrial robot uncertainty compensation method
An industrial robot, uncertainty technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of inability to achieve high-precision control, reduced operation accuracy, poor control effect, etc., to improve position control performance and reduce defects. Affect and reduce the effect of design cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention but not to limit the scope of the present invention.
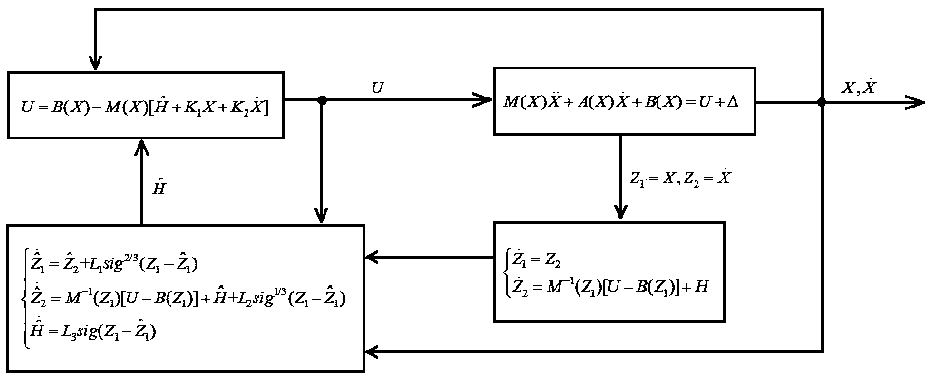
[0026] combine figure 2 , image 3 The method for compensating the uncertainty of industrial robots provided by the present invention comprises the following steps:
[0027] Step 1, by installing an encoder on each joint of the two-axis industrial robot, obtain the angle information and angular velocity information of each joint, and transmit it to the industrial robot controller in real time;
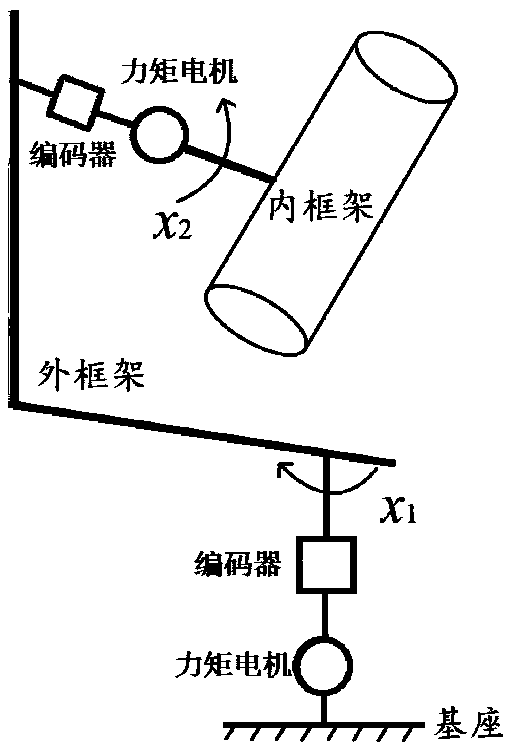
[0028] Such as figure 2 As shown, an encoder and a torque motor are installed between the base and the outer frame as well as the inner and outer frames. The torque motor provides the frame rotation torque, and the encoder obtains the angle and angular velocity information of the join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



