

Surgical auxiliary robot instrument system
A surgical and robotic technology, applied in the field of driving structure of surgical auxiliary robotic instruments, can solve problems such as many friction points, difficult end force feedback to doctors, and long transmission distance, so as to achieve high mechanism reliability and improve overall safety performance, improved reliability, and precision effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
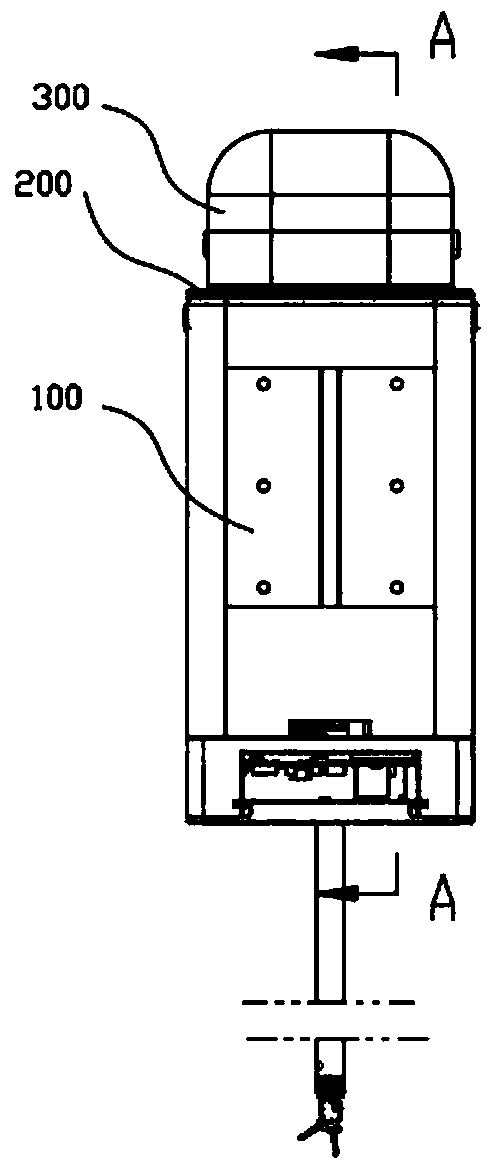
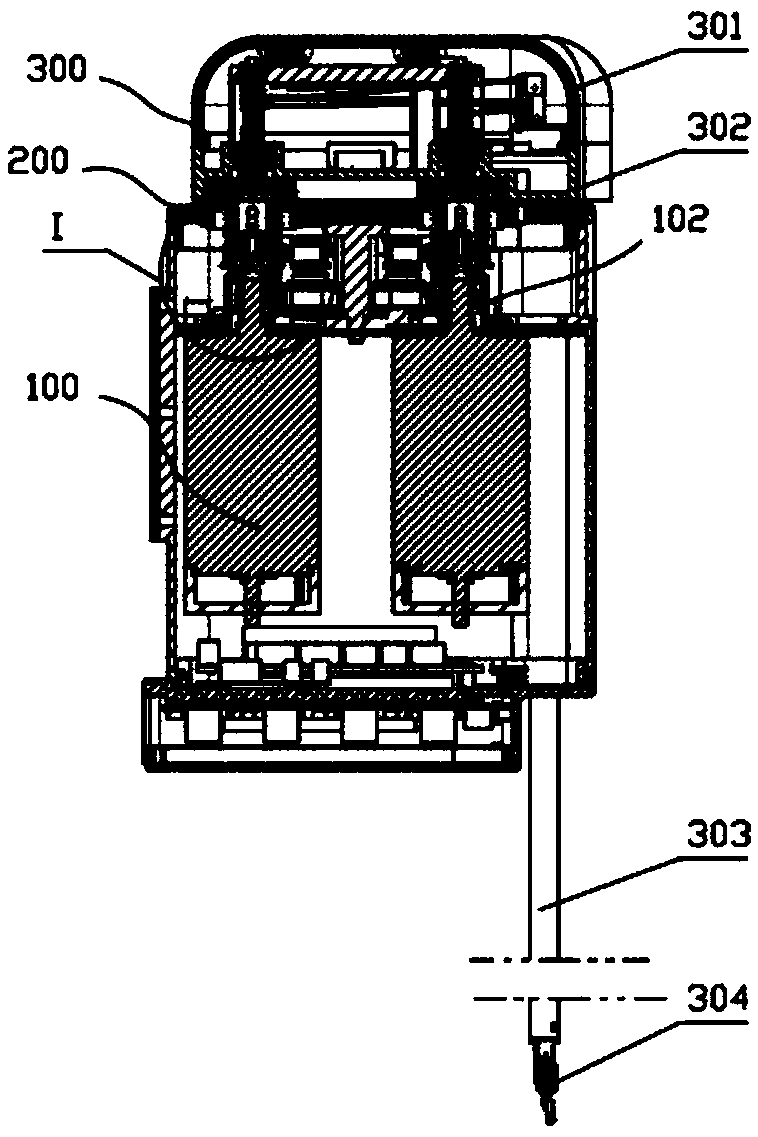
[0090] Such as Figure 1 to Figure 35 As shown, a surgical assisting robot instrument system includes a power part 100 , a sterile divider 200 and an instrument 300 .
[0091] In this embodiment, the power unit includes four power groups, and the four power groups 101 are parallel in a rectangular shape. In other specific embodiments, the number of power groups can be set according to specific needs, such as the number of operating degrees of freedom of the claws of the instrument. Of course, only one power group can also be provided to achieve the purpose of controlling the movement of the claws of the instrument through one or more outputs of the transmission part.
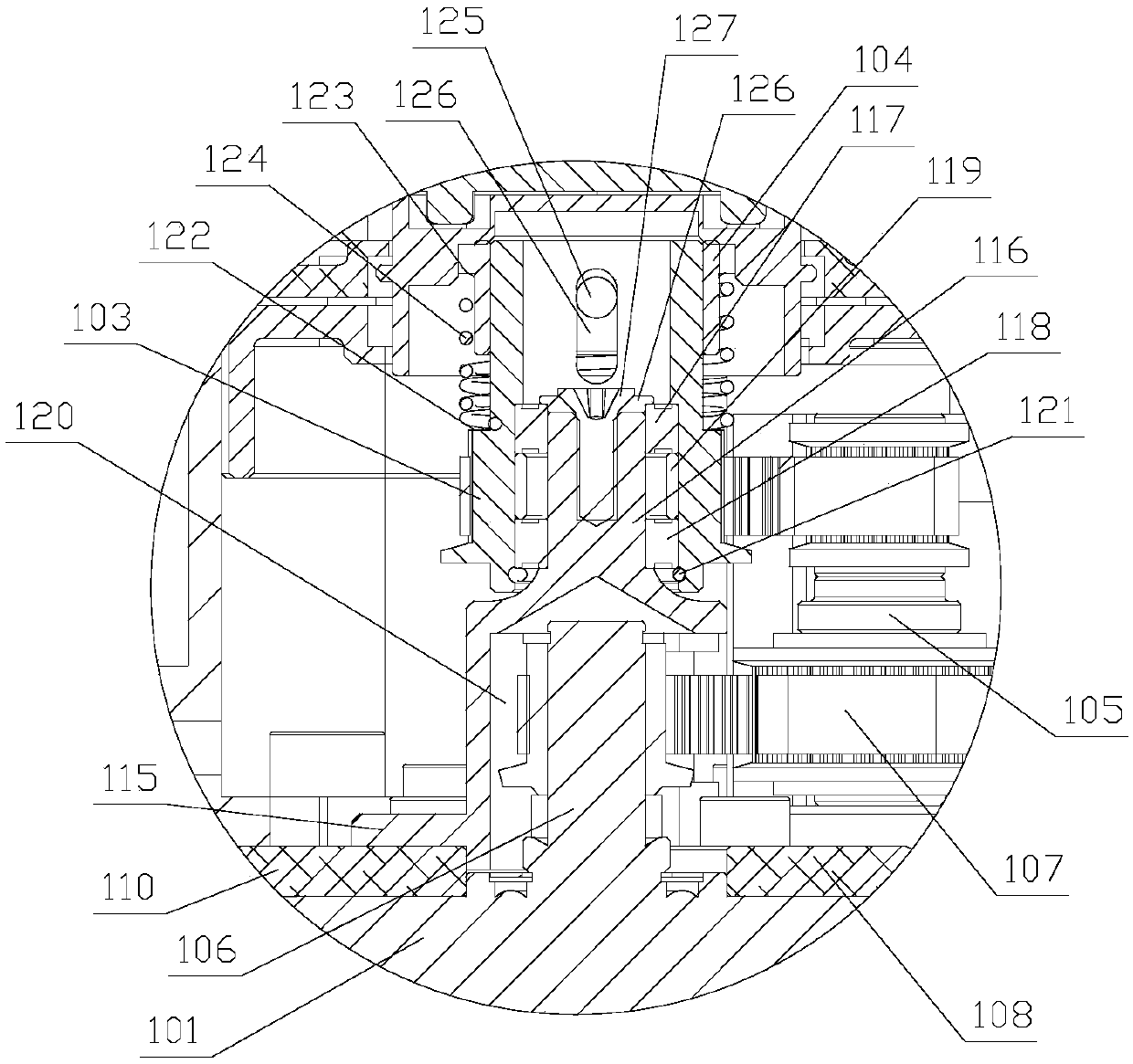
[0092] Such as Figure 1 to Figure 3 As shown, the four power groups all include motors 101, and each motor 101 is connected to a reducer 102, and a telescopic output flange 104 is sleeved o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More