

An automatic rescue system and method for an unmanned cleaning vehicle
A sweeper, automatic technology, applied in the direction of road vehicle traffic control system, traffic control system, electric vehicle, etc., can solve the problems of difficult to push and move, low efficiency, difficult to ensure real-time performance, etc., to achieve timely response and efficiency high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
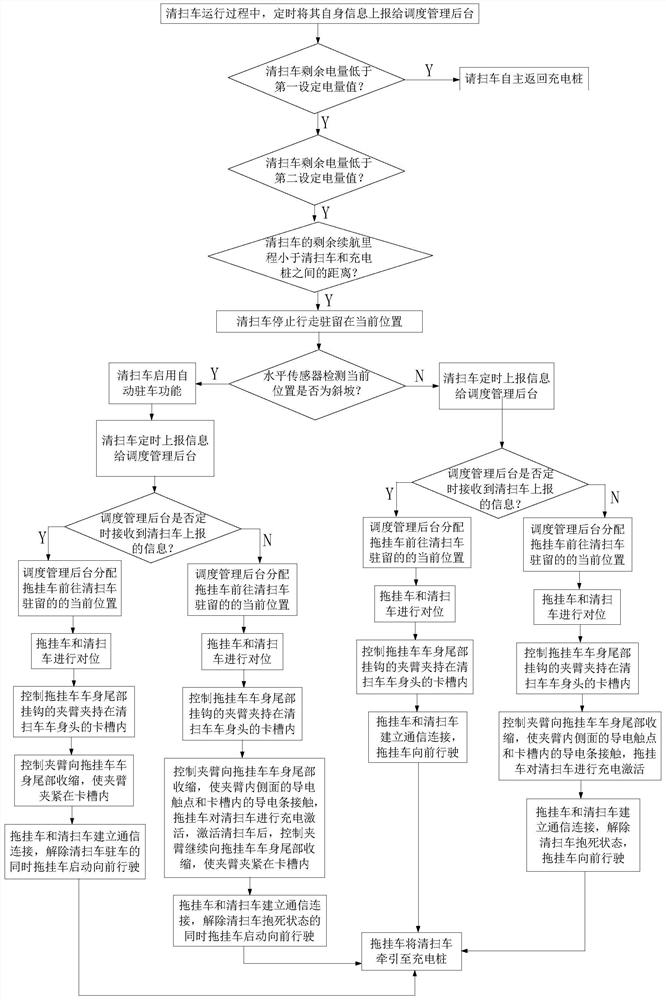
[0030] S1. During the operation of the sweeping vehicle, it regularly (eg every 10s) reports its own information to the dispatch management background, wherein the information includes the position information of the GPS module positioning, the vehicle number and the remaining power information of the battery;
[0031]S2. The scheduling management background determines whether the remaining power of the sweeping vehicle is lower than the first set power value (such as 20% of the total battery power) or the second set power value (such as 5% of the total battery power) based on the received power information, If the remaining power is lower than the first set power value, the dispatch management background sends an instruction to the sweeper to return to the charging pile autonomously, if the remaining power is lower than the second set power value, the dispatch management background calculates the remaining mileage of the sweeper based on the remaining power And judge whether t...
Embodiment 2
[0042] The difference between this embodiment and Implementation 1 is that when the level sensor detects that the current position of the sweeper is a horizontal plane, and the dispatch management background does not regularly receive the information reported by the sweeper, and the sweeper is offline, in steps S5 and The following steps are also included between steps S6: after the clamp arm is clamped in the card slot, the dispatching management background sends an instruction to shrink the traction module to the main control unit, and the main control unit controls the electric telescopic rod to drive the clamp arm to shrink to the rear of the trailer body, Make the conductive contact on the inner side of the clamp arm contact the conductive strip on the inner side of the card slot, and the trailer will charge and activate the sweeper. After activating the sweeper, the trailer and the sweeper will establish a communication connection, and the locked state of the sweeper will ...
Embodiment 3
[0044] The difference between this embodiment and Embodiment 1 is that when the level sensor detects that the current position where the sweeper is parked is a slope, the sweeper activates the automatic parking function, and the scheduling management background regularly receives the information reported by the sweeper, and the sweeper is in the In the online state, the following steps are also included between step S5 and step S6: after clamping the clamp arm in the slot, the scheduling management background sends an instruction to retract the traction module to the main control unit, and the main control unit controls the electric telescopic rod to drive The clamp arm shrinks toward the rear of the trailer body and makes the inner surface of the clamp arm contact the inner surface of the card slot. When the pressure value generated by the pressure sensor on the inner surface of the clamp arm is greater than the set pressure value, it is determined that the clamp arm is clamped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More