

Surgical robot device
A surgical robot and control device technology, applied in the field of medical equipment, can solve problems affecting the surgical effect, tissue damage around the equipment, and physical injury of doctors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to illustrate the present invention more clearly, the present invention will be further described below in conjunction with preferred embodiments and accompanying drawings. Similar parts in the figures are denoted by the same reference numerals. Those skilled in the art should understand that the content specifically described below is illustrative rather than restrictive, and should not limit the protection scope of the present invention.
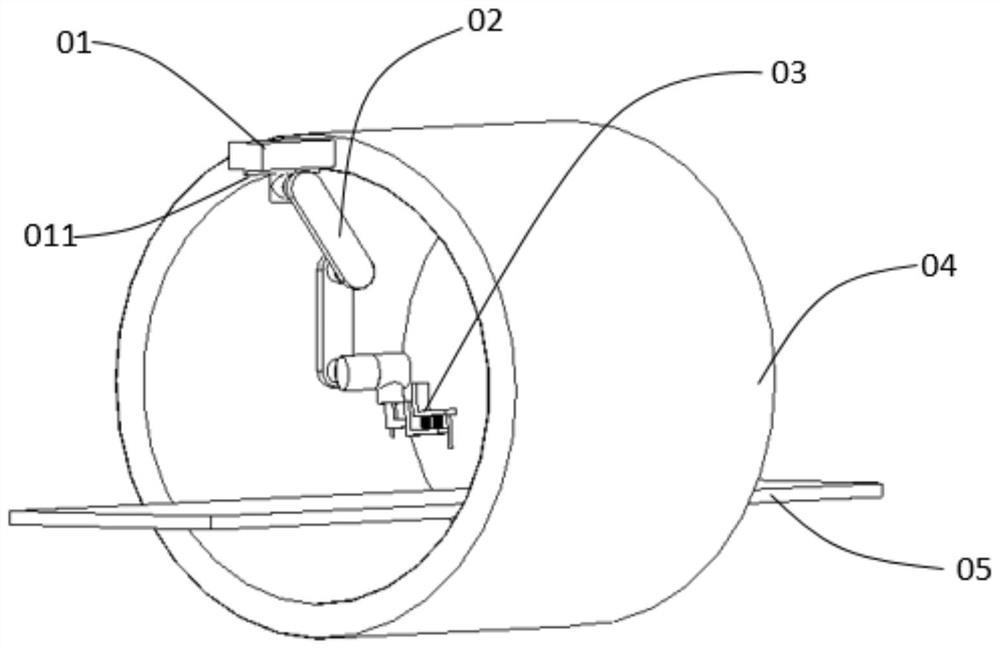
[0025] in such as figure 1 In one embodiment of the surgical robot device of the present invention shown, the device includes a robotic arm 02, a puncture device 03, a three-dimensional scanning machine 04, and a control device. The three-dimensional scanning machine 04 is used to scan the patient's body and obtain scanned images. The control device generates a three-dimensional model of the patient's body based on the scanned image, the doctor selects a focus point in the three-dimensional model, the control system genera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More