

Full-upper-limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve problems such as poor rehabilitation effect, bloated and bulky comfort, unnatural joint movement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
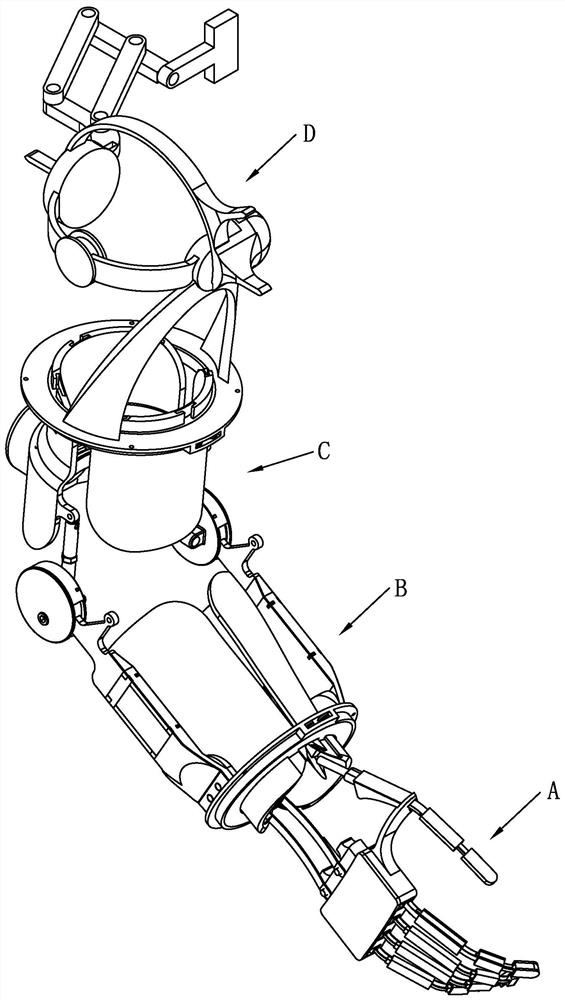
[0043] see figure 1 , figure 2 , Figure 6 , Figure 8 and Figure 14 As shown, a full upper limb exoskeleton rehabilitation robot in this embodiment includes an exoskeleton actuator and a transmission drive mechanism. The exoskeleton actuator includes a shoulder exoskeleton, an elbow exoskeleton, a wrist exoskeleton, and a hand Exoskeleton, the hand exoskeleton is connected to the wrist exoskeleton, the wrist exoskeleton is connected to the elbow exoskeleton, and the elbow exoskeleton is connected to the shoulder exoskeleton;
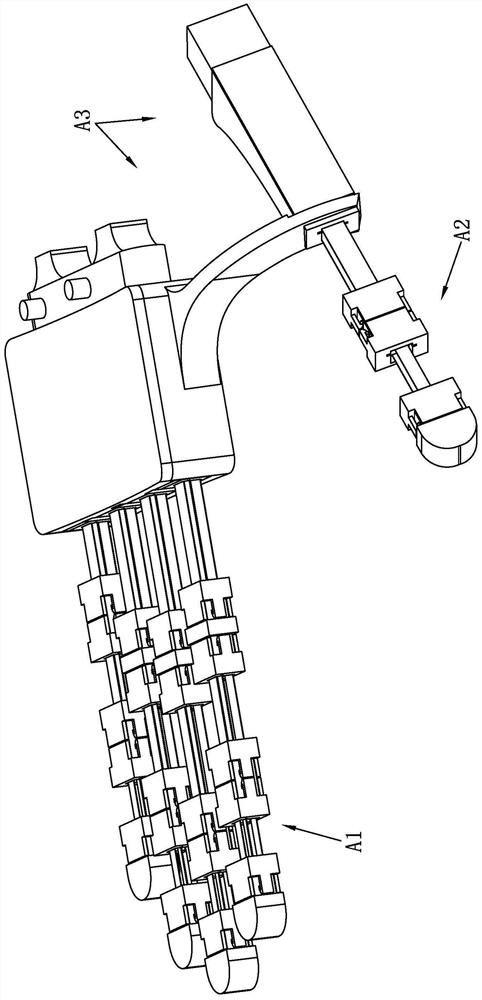
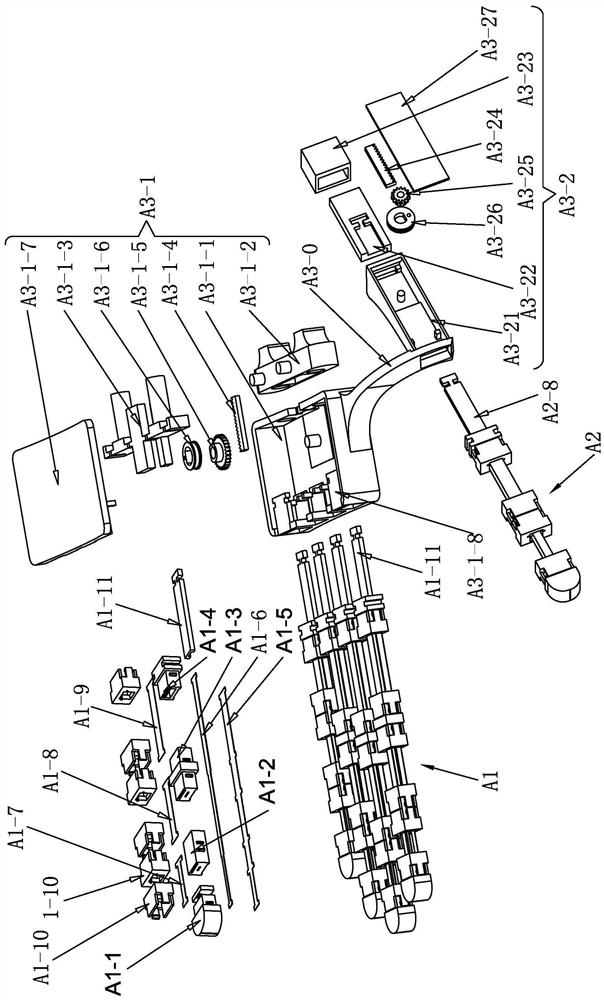
[0044] The shoulder exoskeleton, elbow exoskeleton, wrist exoskeleton, and hand exoskeleton are all mirror-image interchangeable structures. The hand exoskeleton A includes a thumb module A2, a palm module A3, and four finger modules A1. The thumb module A2 and the four finger modules A1 are respectively connected to the palm module A3; the thumb module A2 and the four finger modules A1 are respectively a three-layer reed coupling driving structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More