

A full upper limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve the problems of lack of perception function and mirror exchange function, bloated and heavy comfort, unnatural joint movement, etc., to achieve human-machine compatibility, reduce costs, The effect of simplifying the institutional form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
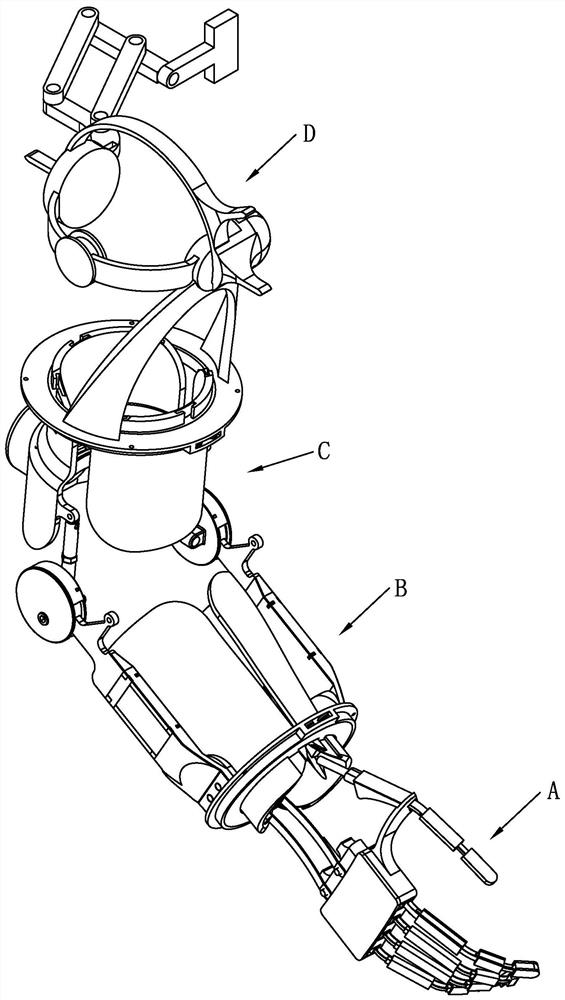
[0043] see figure 1 , figure 2 , Image 6 , Figure 8 and Figure 14 As shown in the figure, a full-upper limb exoskeleton rehabilitation robot in this embodiment includes an exoskeleton actuator and a transmission drive mechanism, and the exoskeleton actuator includes a shoulder exoskeleton, an elbow exoskeleton, a wrist exoskeleton, and a hand exoskeleton. Exoskeleton, hand exoskeleton connected to wrist exoskeleton, wrist exoskeleton connected to elbow exoskeleton, elbow exoskeleton connected to shoulder exoskeleton;
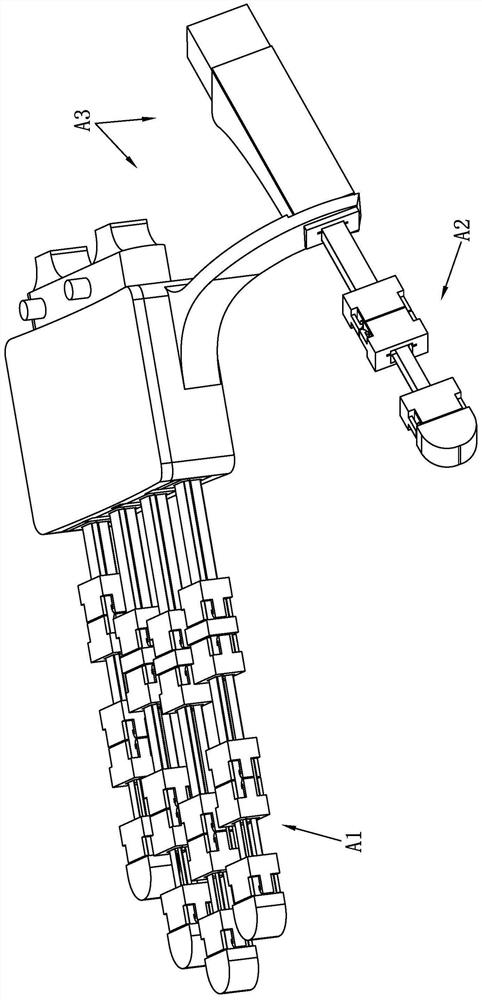
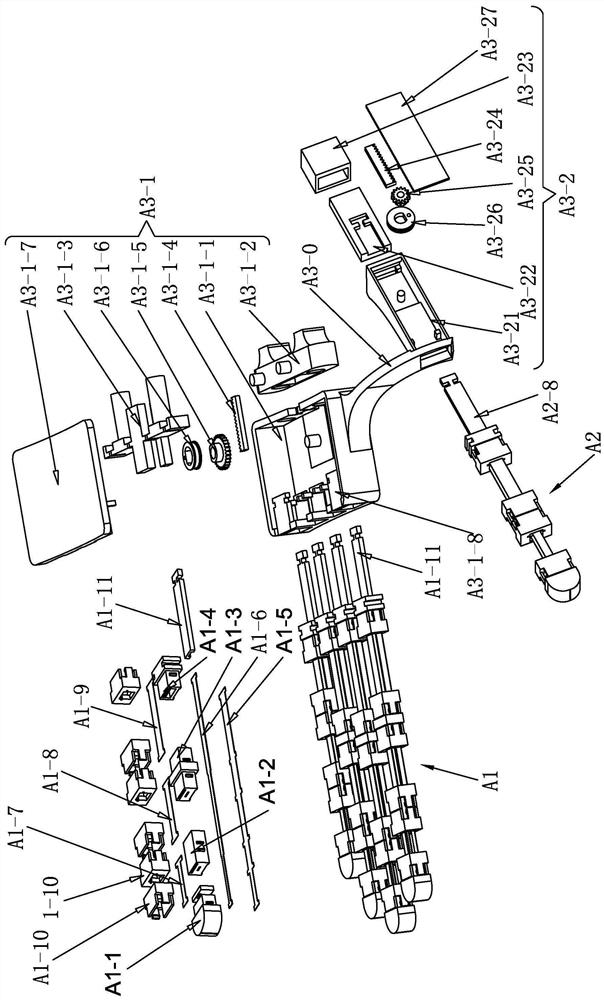
[0044] The shoulder exoskeleton, the elbow exoskeleton, the wrist exoskeleton, and the hand exoskeleton are all mirror image interchangeable structures. The hand exoskeleton A includes a thumb module A2, a palm module A3, and four finger modules A1. The thumb module A2 and the four finger modules A1 are respectively connected to the palm module A3; the thumb module A2 and the four finger modules A1 are respectively three-layer reed coupling driving struc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More