

Brain-computer interface based method and system for human-multirobot shared control
A multi-robot and brain-computer interface technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of inability to obtain multi-robot strategies and different single-robot strategies, and achieve the effect of reasonable strategy selection and reduced burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
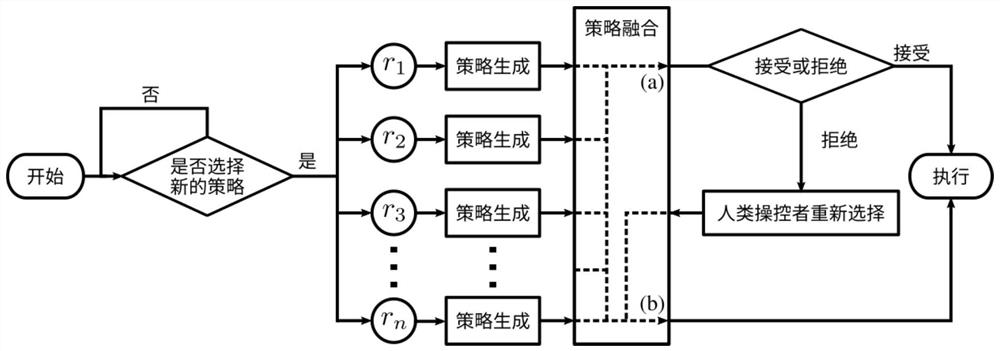
[0042] Such as figure 1 As shown, the implementation steps of the brain-computer interface-based human-multi-robot shared control method in this embodiment include:
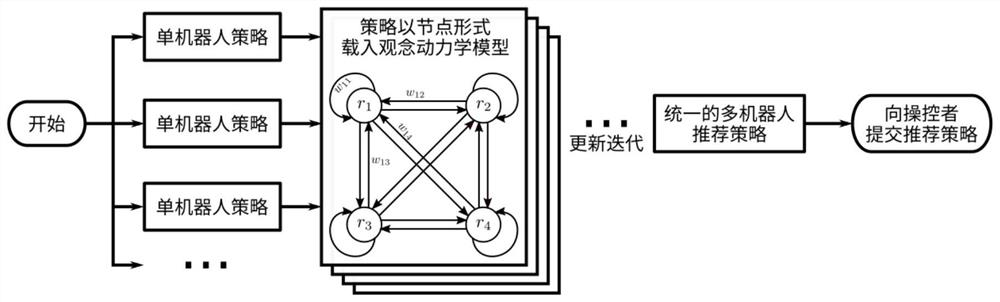
[0043] 1) Each robot in the multi-robot system obtains a different single-robot strategy based on the world model maintained by itself, and submits it to a designated node in the multi-robot system, which is a robot (a distributed multi-robot system does not have a management terminal, Each single robot is processed independently) or management terminal (control terminal of centralized multi-robot system);
[0044] 2) Designate the node to fuse the single robot strategy to eliminate differences and get a unified recommendation strategy and push it to the client;
[0045] 3) The client judges whether the operator approves the recommended strategy based on the brain-computer interface. If approved, accept the recommended strategy as the final strategy and skip to step 6), otherwise execute step 4);
[0046] 4) Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More