Garbage bottle cleaning robot and control method
A robot and garbage technology, applied in the field of intelligent robots, can solve the problems of high incidence of chronic respiratory diseases, hard work of cleaners, artificial dead ends, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
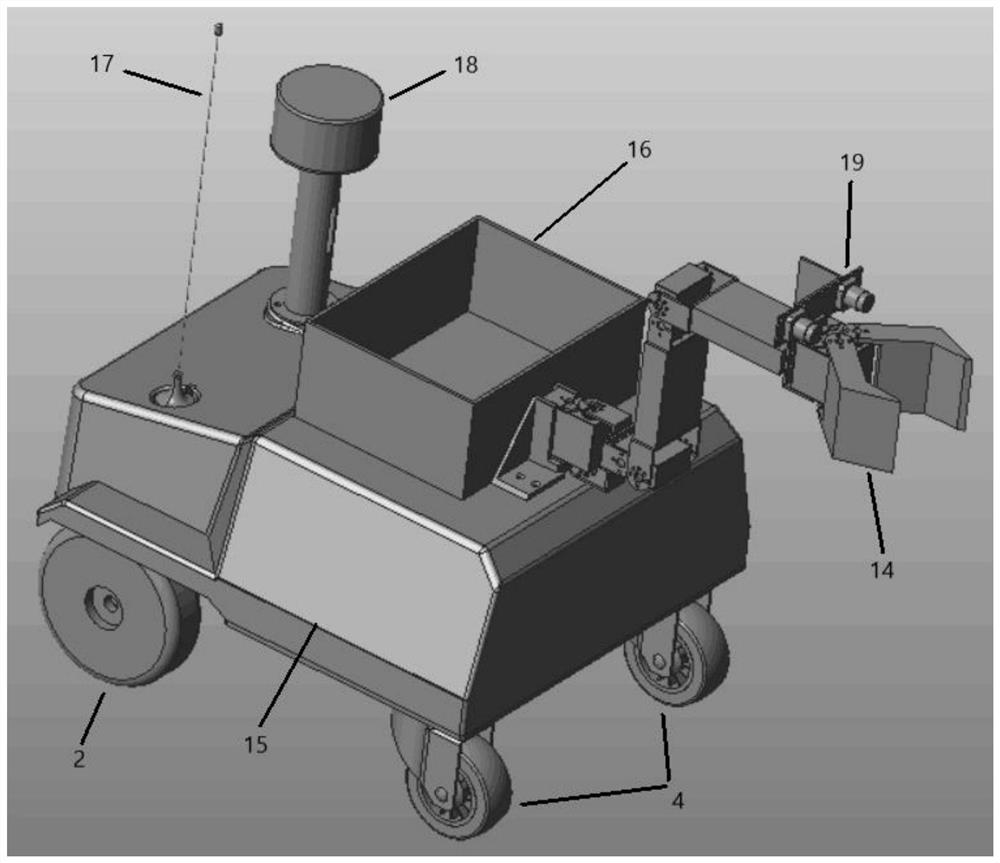
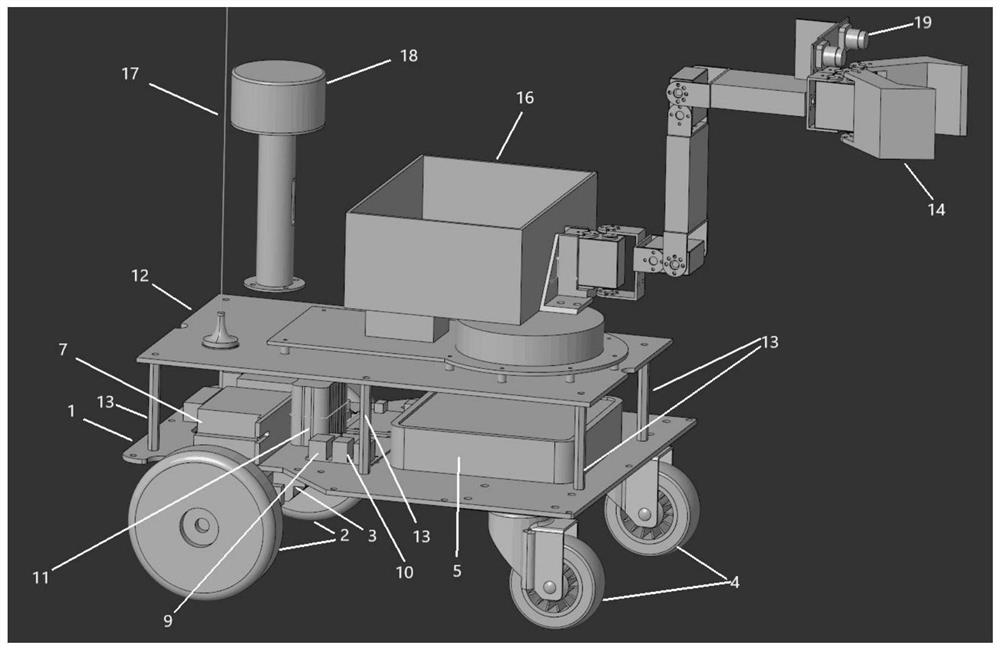
[0067] Embodiments of the present invention provide a garbage bottle cleaning robot, such as figure 1 As shown, it includes: a base plate 1, a middle layer partition 12, a casing 15, a mechanical arm 14 and a micro-host 5, the lower surface of the base plate 1 is provided with a driving wheel 2, a stepping motor 3 and a universal driven wheel 4, and the upper surface of the base plate 1 The micro-host 5, the development board 6 and the stepping motor driver 7 are provided, the stepping motor driver 7 is used to drive the stepping motor 3, and then drive the driving wheel 2 to control the movement of the robot, the micro-host 5 and the development board 6 is electrically connected, and is used as the upper computer t...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap