

Quadruped robot based on middle-waist auxiliary movement
A quadruped robot with mid-waist technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of reducing the practicality and reliability of the robot, and increasing the complexity of the robot's leg control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the embodiments shown in the drawings, but it should be noted that these embodiments are not a limitation of the present invention, and those of ordinary skill in the art make functional, method, or structural improvements based on these embodiments. Equivalent changes or substitutions fall within the protection scope of the present invention.
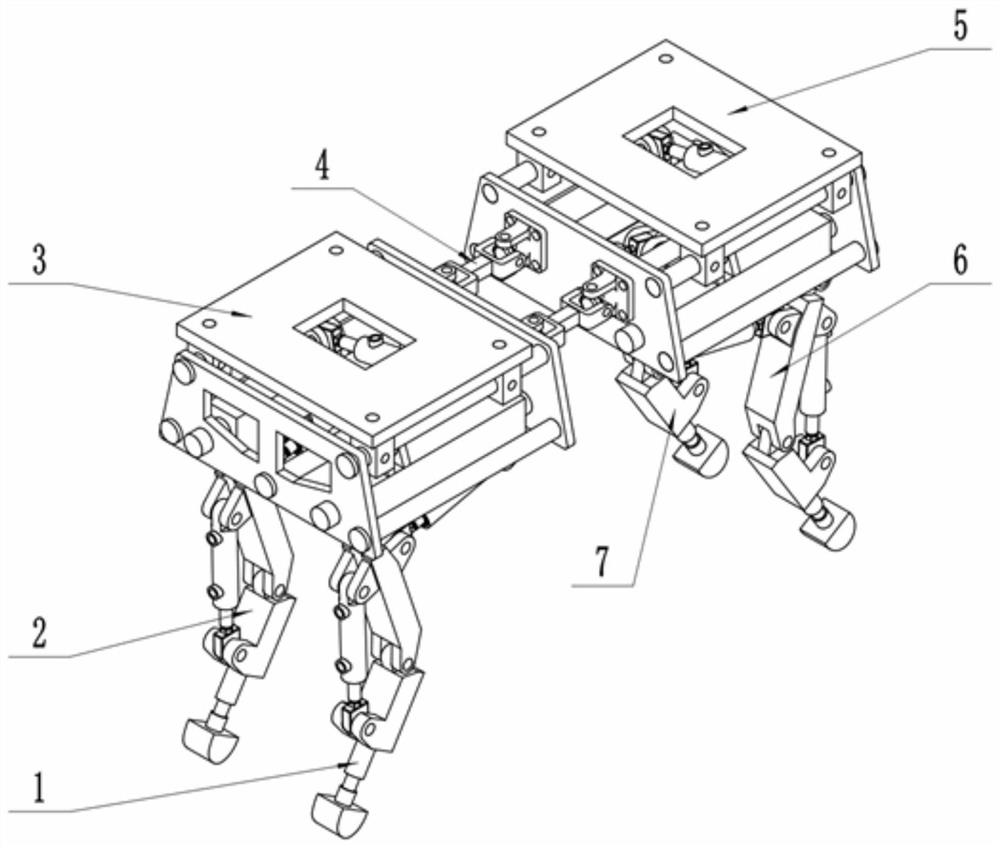
[0036] Participate figure 1 , image 3 As shown, this embodiment provides a quadruped robot based on mid-waist assisted movement, including left front leg 1, right front leg 2, front body 3, middle waist 4, rear body 5, left rear leg 6 and right rear leg 7. ; The left front leg 1 and the right front leg 2 are connected to the front body 3, the left rear leg 6 and the right rear leg 7 are connected to the rear body 5, and the front body 3 is connected to the rear body 5 through the mid-waist 4;
[0037] The left front leg 1, the right front leg 2, the left rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More