

A three-state locking device for a flexible robot
A locking device and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that the state control method of manipulating the robot is difficult to apply, the control method cannot be realized, and the electromagnetic force method is incompetent.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the above objects, features and advantages of the present invention more clearly understood, the technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments. It should be pointed out that the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, those of ordinary skill in the art can obtain all the Other embodiments fall within the protection scope of the present invention.
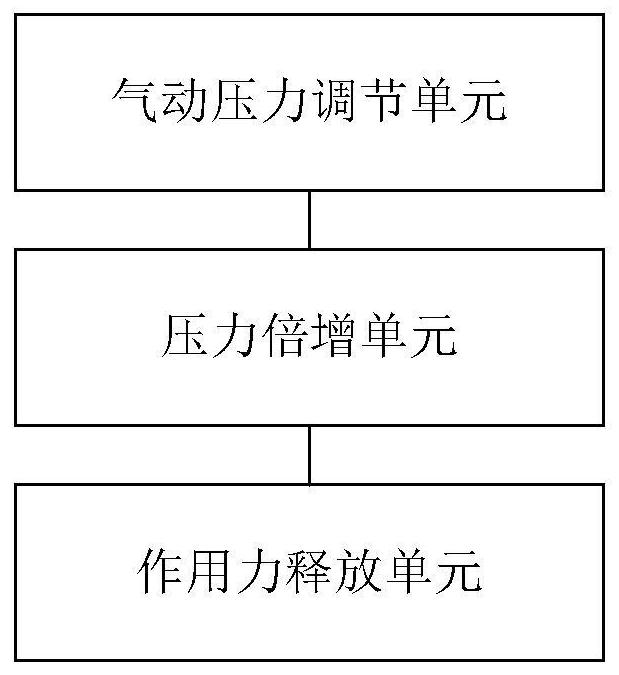
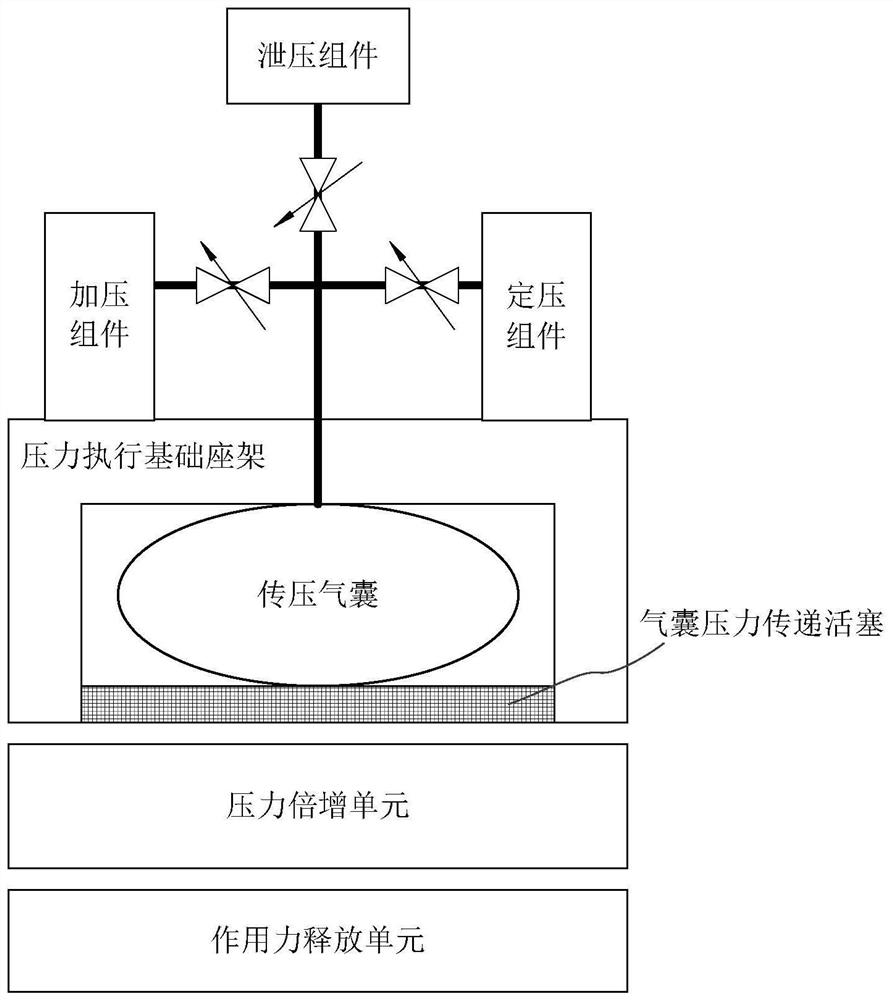
[0039] see figure 1 , in an embodiment of the present invention, a three-state locking device for a flexible robot is provided. Generally speaking, flexible robots are required to be used in complex environments such as underwater and strong electromagnetic interference, and have multiple controllable states. The three-state locking device for the flexible robot in this embodiment (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More