Dynamic target traversal access sequence planning method and system
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology for accessing sequences and dynamic targets, applied in genetic rules, instruments, calculation models, etc., can solve problems such as poor optimization results and low optimization efficiency
Pending Publication Date: 2021-03-26
NAT UNIV OF DEFENSE TECH
View PDF0 Cites 4 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] Aiming at the defects of low optimization efficiency and poor optimization results in the prior art, the present invention provides a dynamic target traversal access sequence planning method and system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
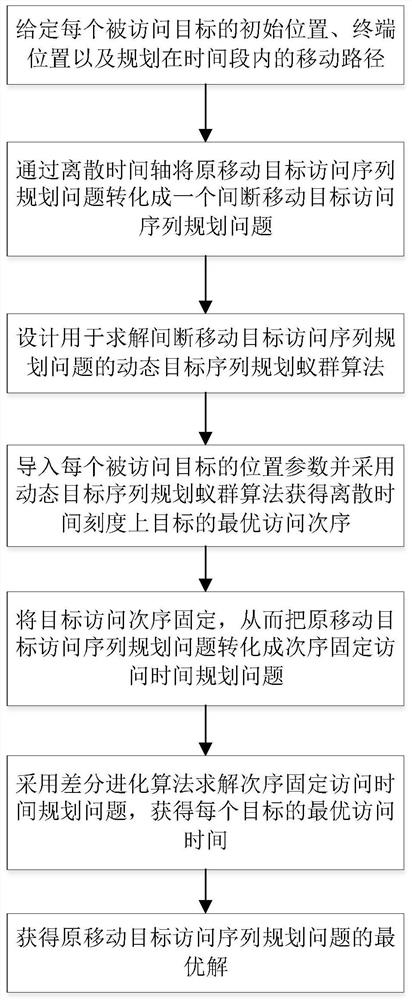
[0087] like image 3 As shown, the dynamic target traversal access sequence planning method provided in this embodiment includes the following steps:
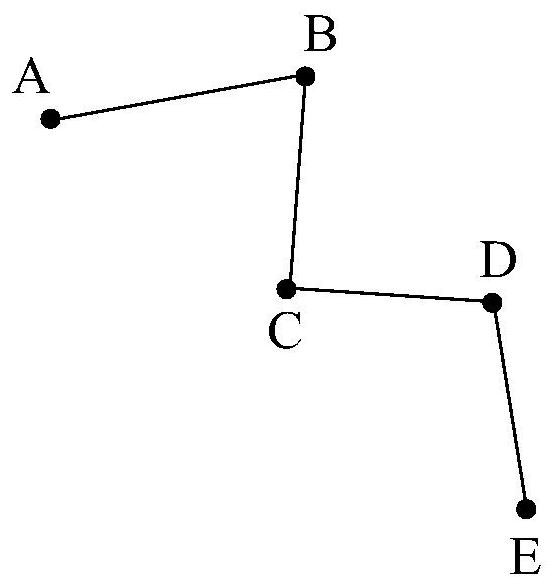
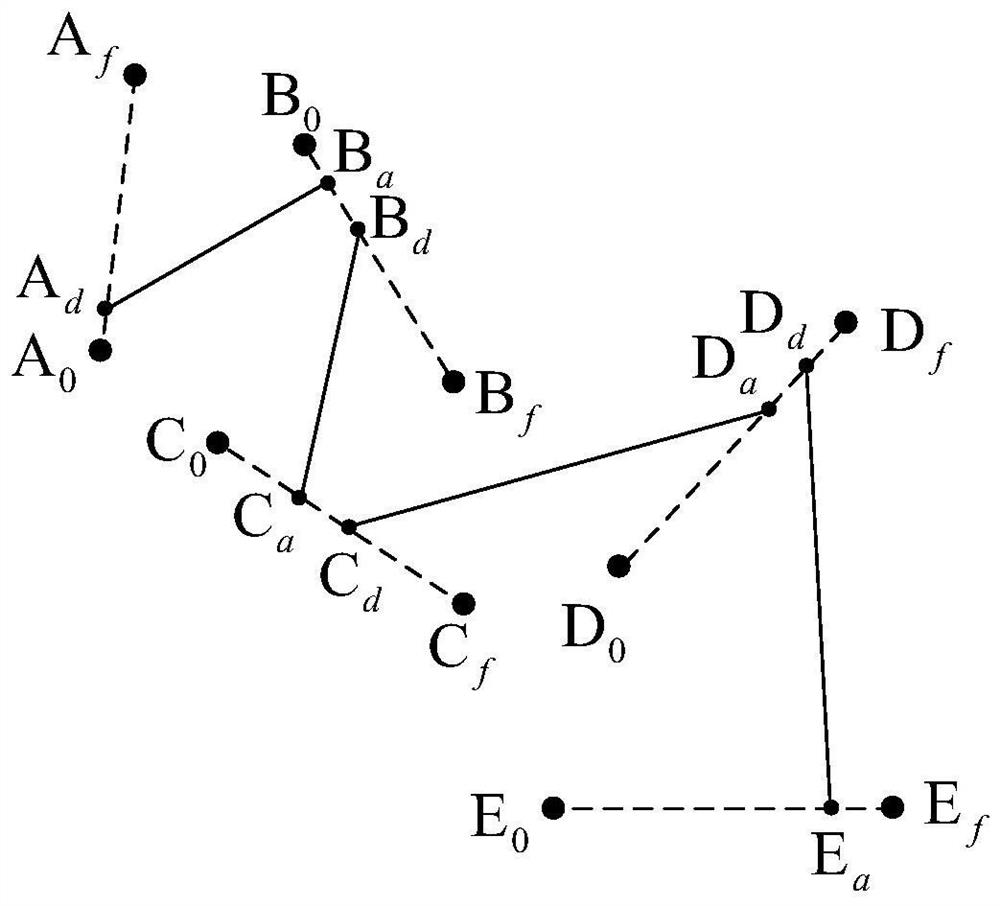
[0088] S1: Given the initial position of each target in the access sequence planning problem of moving targets, the terminal position and the moving path of each target within the planning time period ΔT.
[0089] S2: Transform the moving target access sequence planning problem into an intermittent moving target access sequence planning problem through the discrete time axis, and construct the intermittent moving target access sequence planning problem model.
[0090] The original moving target access sequence planning problem can be described as the following form:
[0091] The design variables of the moving target access sequence planning problem are:
[0092] x 1 =[S 1 ,S 2 ,...,S N , T 1 , T 2 ,...,T N ,Δt 1 ,Δt 2 ,...,Δt N ] (1)
[0093] Among them, N is the number of targets; S i is the access order of the i-t...
Embodiment 2
[0153] Using the dynamic target traversal access sequence planning method provided in Embodiment 1, this embodiment takes a planar mobile city parade sequence planning problem as an example for illustration.
[0154] S1: Given the initial position of each visited target, the terminal position and the moving path of each target within the ΔT time period.
[0155] The time period ΔT of this calculation example is taken as 0 to 60 minutes, and the number of moving cities is 15, among which city 1 is fixed as the initial departure city. The location coordinates of the 15 mobile cities at the initial 0min and terminal 60min are shown in Table 1. Each city moves in a straight line from its initial position to its terminal position with a constant velocity. Moving trajectory such as Image 6 shown. The position of the triangle is the initial position of each city, and the position of the circle is the terminal position. The ranger also moves in a straight line from the current ci...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a dynamic target traversal access sequence planning method and system. The method comprises the following steps: giving an initial position and a terminal position of each target and a moving path of each target in a planning time period; converting a moving target access sequence planning problem into an intermittent moving target access sequence planning problem through adiscrete time axis, and constructing a problem model; solving the intermittent moving target access sequence planning problem model by adopting a dynamic target sequence planning ant colony algorithmto obtain an optimal target access sequence of the intermittent moving target access sequence planning problem; fixing the target access sequence so that an original moving target access sequence planning problem is converted into a sequence fixed access time planning problem, creating and solving a problem model to acquire the optimal access time of each target and finally, acquiring the optimalsolution of the original moving target access sequence planning problem. Optimization efficiency and the optimization success rate of the moving target access sequence planning problem are effectively improved.
Description
technical field [0001] The present invention mainly relates to the technical field of dynamic target access sequence planning, in particular to a dynamic target traversal access sequence planning method and system. Background technique [0002] Traveling Salesman Problem (TSP), as a typical access sequence planning problem, has been widely studied. This kind of problem requires the planner to find a shortest path, so that the traveling salesman starts from a certain city, visits all the given cities without omission or repetition, and finally returns to the starting city. The classic TSP problem is a static target access sequence planning problem, and the location of the city remains unchanged, so the classic TSP problem is a pure combinatorial optimization problem. As a variant of the classic TSP problem, the dynamic TSP problem refers to the problem that the location of the city will change with time, and it is a kind of moving target access sequence planning problem. In...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More