

An Intelligent Path Planning Method for Mobile Robots
A mobile robot and path planning technology, which is applied in the direction of instruments, non-electric variable control, vehicle position/route/height control, etc., can solve the problems of local optimal oscillation and optimization failure of artificial potential field method, and achieve real-time avoidance. Effects of disability capability, high usability, and research value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The following will clearly and completely describe and discuss the technical solutions in the embodiments of the present invention with reference to the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all of the examples. All other embodiments obtained by those of ordinary skill in the art without creative work, all belong to the protection scope of the present invention.
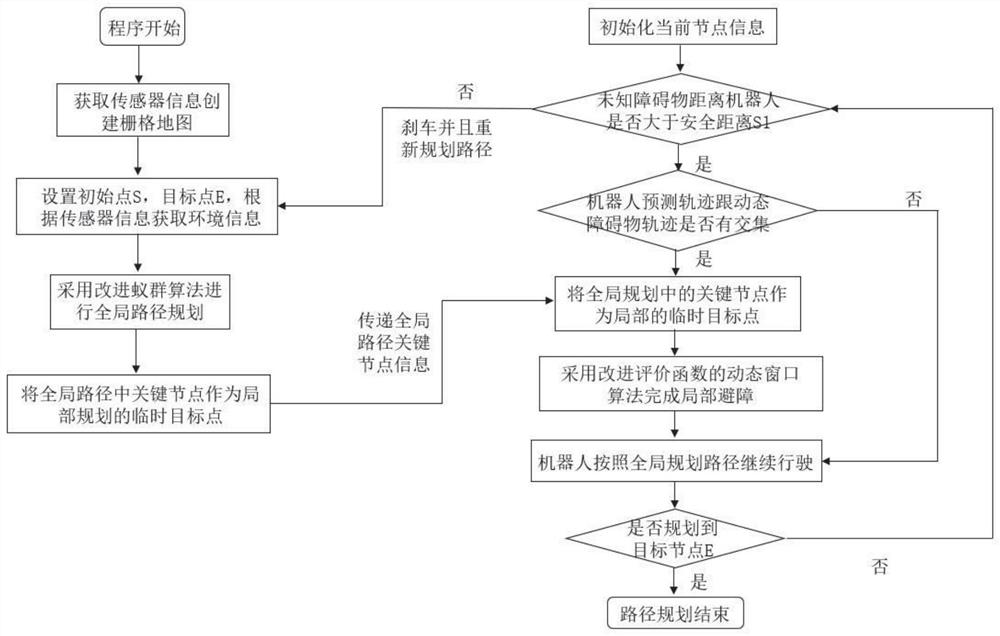
[0061] like Figure 1-5 As shown, this embodiment discloses an intelligent path planning method for a mobile robot, including the following steps:
[0062] Step 1: Build a grid map according to the known static two-dimensional space, set the grid number, and select the starting point S and the target point E;
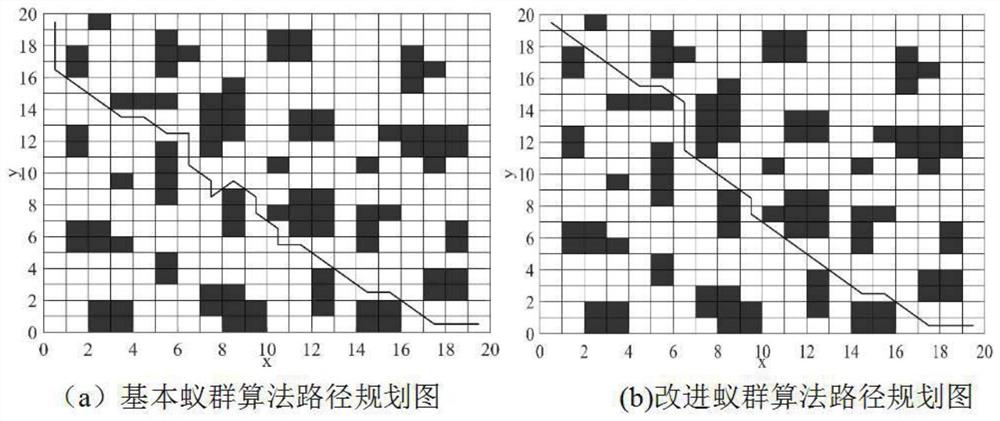
[0063] Step 2: Improve the ant colony algorithm for global path planning;
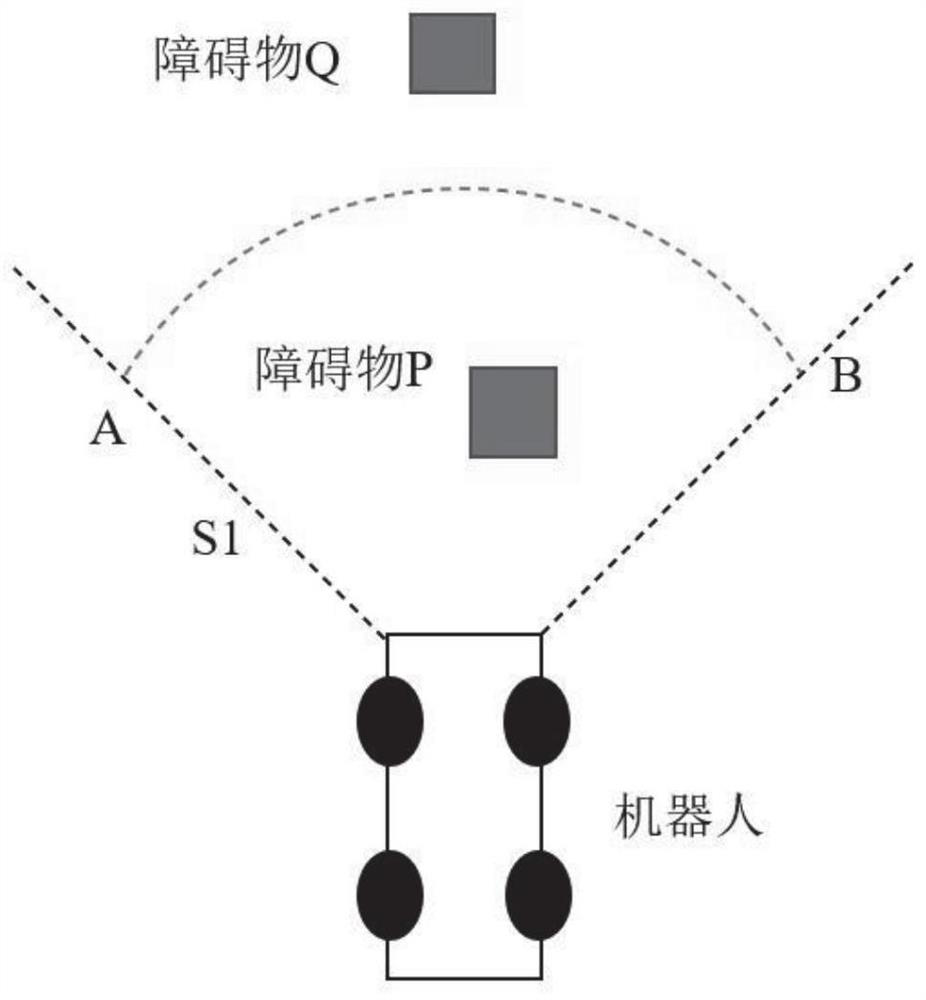
[0064] Step 3: The mobile robot travels on the globally planned path, the mobile robot sensor module detects unknown obst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More