

Obstacle track prediction method and device, electronic equipment and automatic driving vehicle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
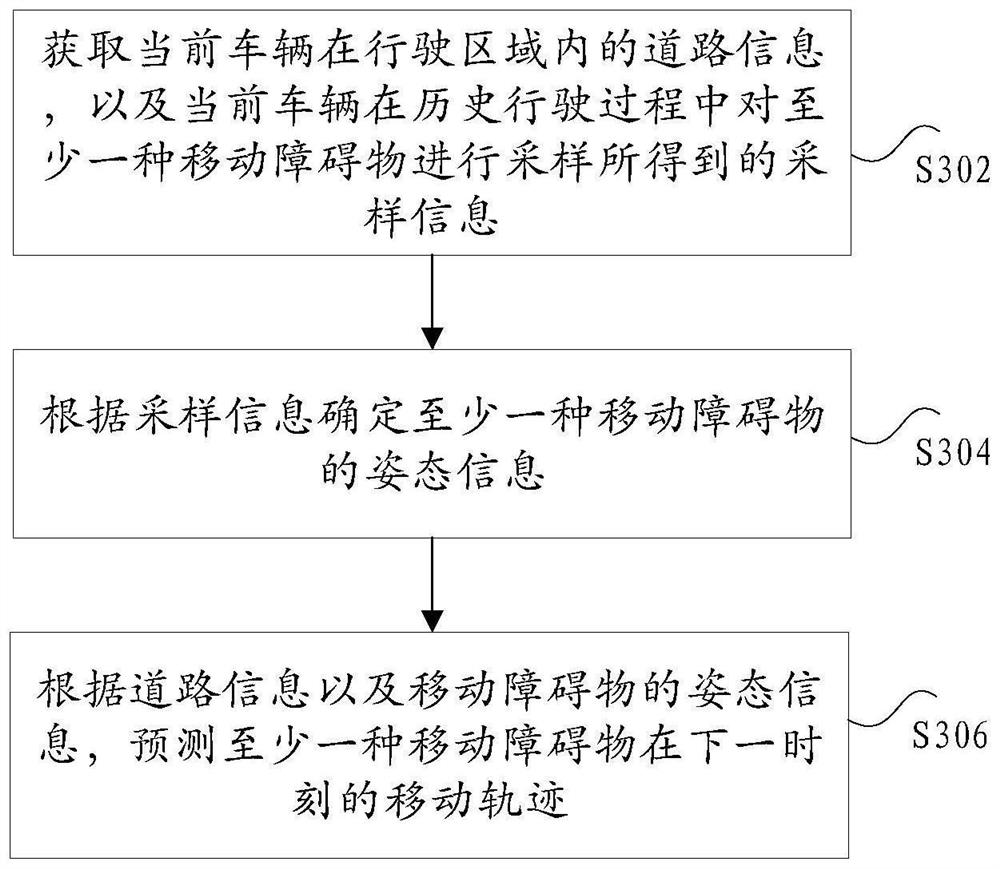
[0034] According to an embodiment of the present disclosure, an embodiment of a method for predicting obstacle trajectories is provided. It should be noted that the steps shown in the flow charts of the drawings can be executed in a computer system such as a set of computer-executable instructions, Also, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
[0035] In addition, it should be noted that the electronic equipment running on the vehicle can be used as the execution subject of the method provided by the embodiment of the present disclosure, wherein the electronic equipment includes but is not limited to: microcomputer, smart tablet, vehicle-mounted central control computer, and vehicle-mounted laptop.
[0036] figure 1 is a schematic diagram of an obstacle trajectory prediction method according to the prior art, such as figure 1As shown, the exist...
Embodiment 2
[0075] According to an embodiment of the present disclosure, an embodiment of an obstacle trajectory prediction device is also provided, wherein, Figure 7 is a schematic diagram of an obstacle trajectory prediction device according to Embodiment 2 of the present disclosure, the device includes: an acquisition module 701, configured to acquire road information of the current vehicle in the driving area, and at least one The sampling information obtained by sampling a moving obstacle; the determination module 703 is used to determine the attitude information of at least one moving obstacle according to the sampling information, wherein the attitude information includes at least: the shape information of the moving obstacle; the prediction module 705, It is used for predicting the movement track of at least one kind of moving obstacle at the next moment according to the road information and the attitude information of the moving obstacle.
[0076] It should be noted that the acq...
Embodiment 3
[0084] According to another aspect of the embodiments of the present disclosure, there is also provided an electronic device, including: at least one processor; and a memory communicatively connected to the at least one processor; wherein, the memory stores instructions executable by the at least one processor, The instructions are executed by at least one processor, so that the at least one processor can execute the method for predicting the trajectory of an obstacle in Embodiment 1 above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More