

Mobile robot path planning method based on bidirectional crawler
A mobile robot, path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as long path length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
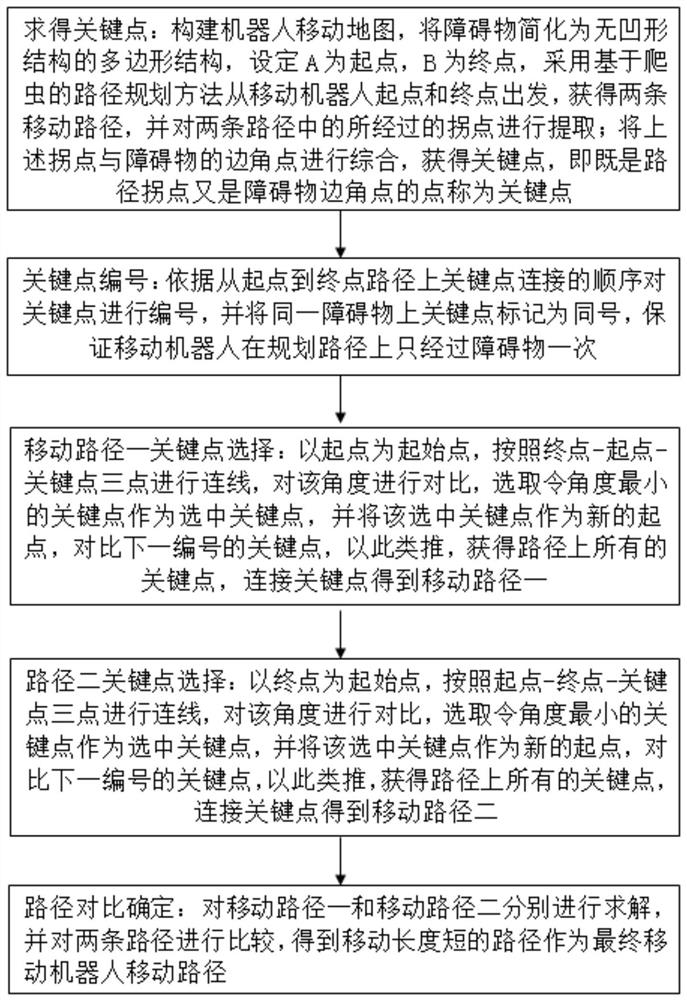
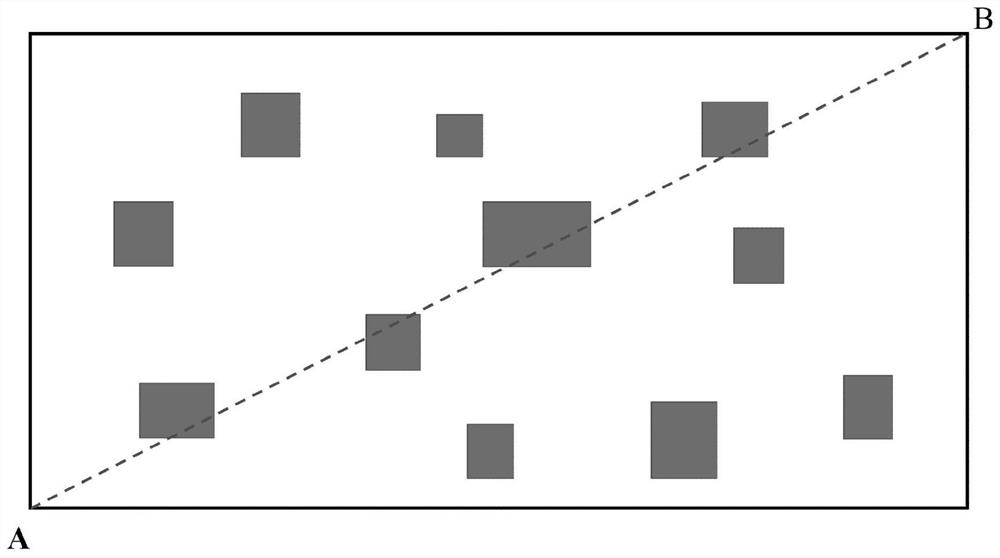
[0033] Build a robot mobility map to figure 1 Take the map shown as an example, where point A represents the starting point of the mobile robot’s movement, and point B represents the end point. The obstacle is simplified to a polygonal structure without a concave structure. The blue square in the figure represents the obstacle, and the red dotted line represents the optimal moving path .
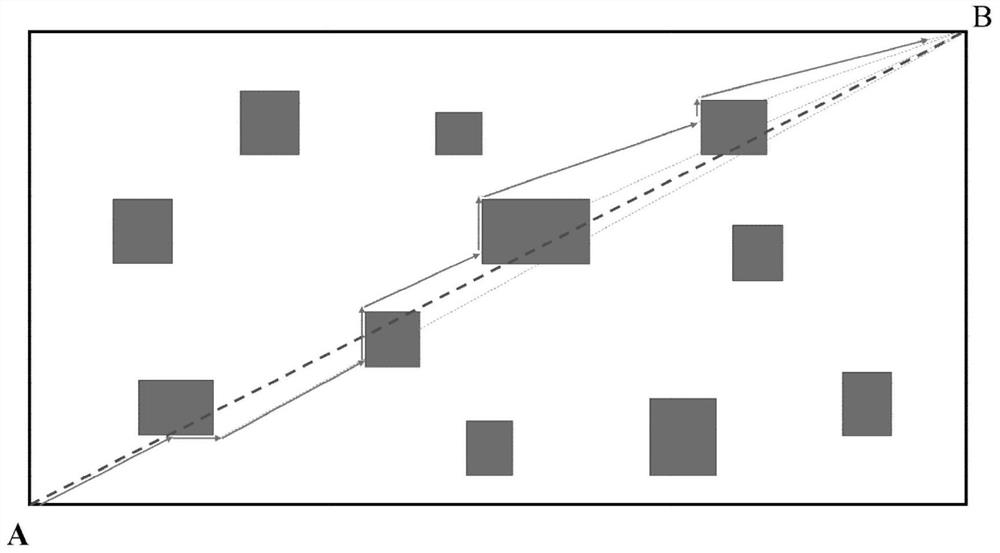
[0034] First, the traditional crawler algorithm is used to plan the path of the mobile robot. The moving path from point A to point B is as follows: figure 2 As shown, the moving path from point B to point A is as follows image 3 As shown, the solid line with arrows in the figure represents the moving path of the mobile robot, and the dotted line represents the auxiliary line from each inflection point to the end point.
[0035] Then plan the path according to the bidirectional crawler-based mobile robot path planning method provided by the present invention, and the specific process is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More