

A Mobile Path Planning Method for Auxiliary Positioning Beacon Nodes
A mobile path and beacon node technology, applied in the field of wireless sensor networks, can solve the problems of unfavorable wireless sensor network networking, large moving path length, long time for sensor nodes to know their own position coordinates, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the drawings.
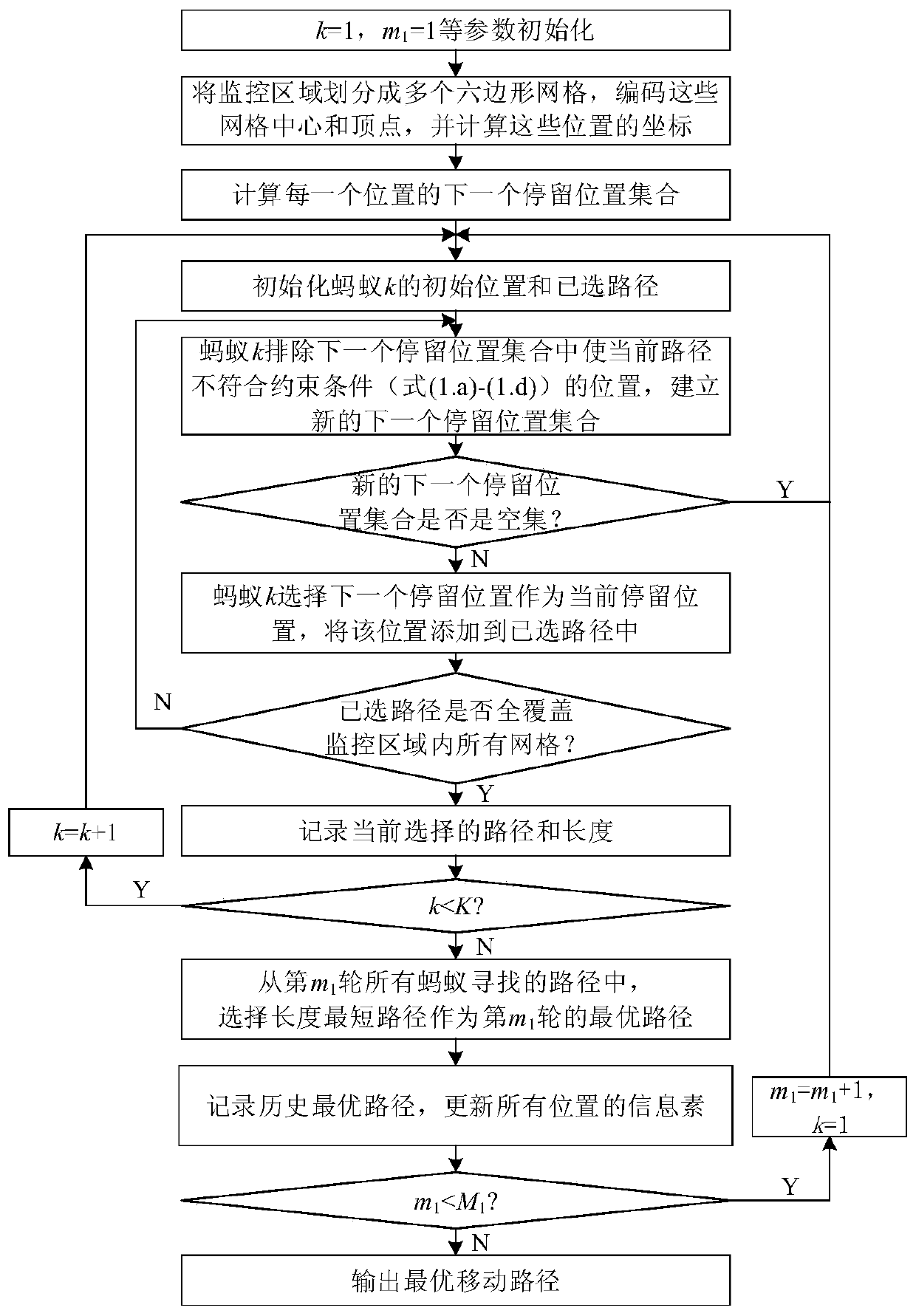
[0049] Reference Figure 1 ~ Figure 4 , A mobile path planning method for assisting positioning beacon nodes, including the following steps:
[0050] 1) Program initialization: the current ant k=1 in the initialization algorithm, the initial value of the iteration number m 1 =1, pheromone volatilization factor ρ=0.2, total pheromone release Q=600, maximum number of iterations M 1 =300 and the number of ants K=30 and other parameters, according to the wireless sensor network application project, initialize the side length of the monitoring area, the node communication radius and the height of the hexagonal grid;
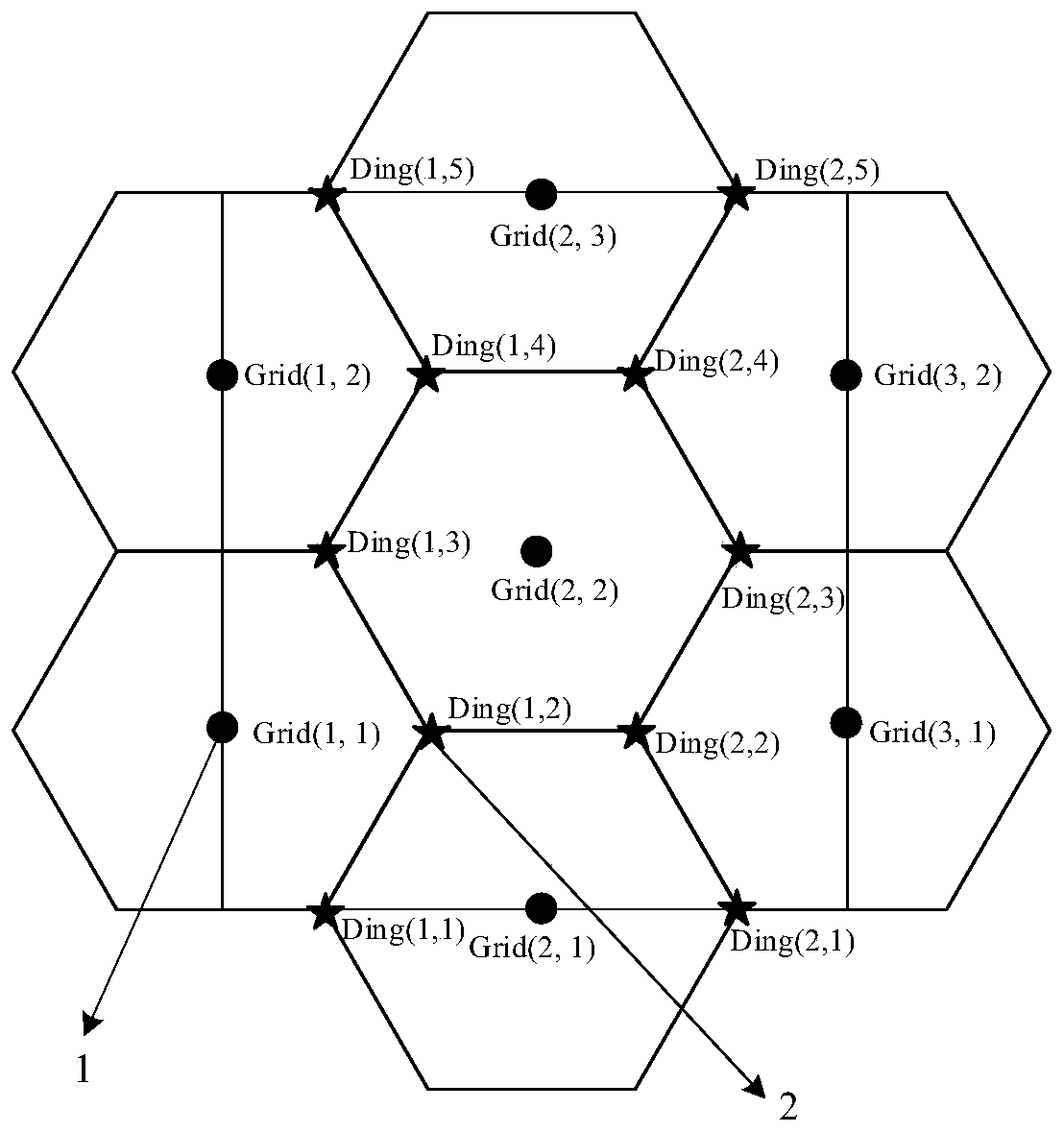
[0051] 2) According to the side length of the monitoring area and the height of the hexagonal grid, calculate the number of columns and rows of the hexagonal grid for the full coverage of the monitoring area; for all the centers and vertices of the hexagonal grids, from left to R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More