

Rapid positioning and tracking method and device for assisting robot
A positioning tracking and robot technology, applied in the field of robot navigation, positioning and tracking, can solve the problems of complicated optional devices, poor positioning accuracy, and large amount of calculation, and achieve the effect of simplifying surgical steps, saving operation time, and reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
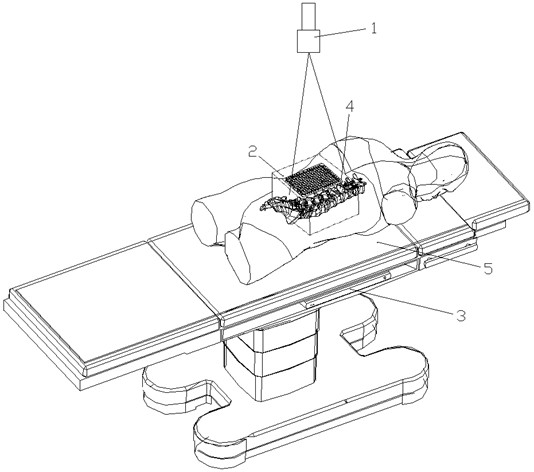
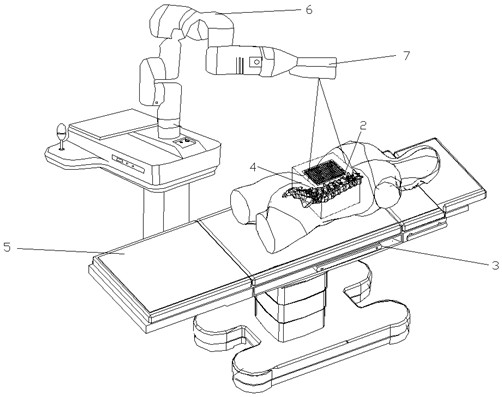
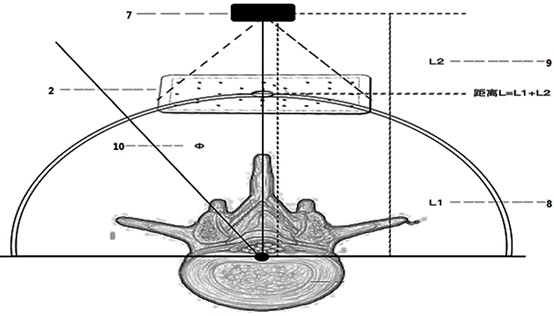
[0029] The invention relates to the technical field of auxiliary robot navigation, positioning and tracking, and is a technology that adopts MRI image measurement before use, static fusion of X-ray images during use, and three-dimensional visual imaging measurement at the working end of the robot, laser-assisted positioning, and visual tracking and positioning technologies to realize the robot. In the operation, there is no need to rely on special navigation eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More