

Method and system for flexible joint shake suppression based on trajectory optimization control
A flexible joint and trajectory optimization technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve problems such as residual jitter, equipment running lag, end jitter, etc., to improve residual jitter, improve operating efficiency, and optimize acceleration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The following will further describe in detail the method and system technical solution for the flexible joint shaking suppression based on trajectory optimization control involved in the present invention with reference to the embodiments.
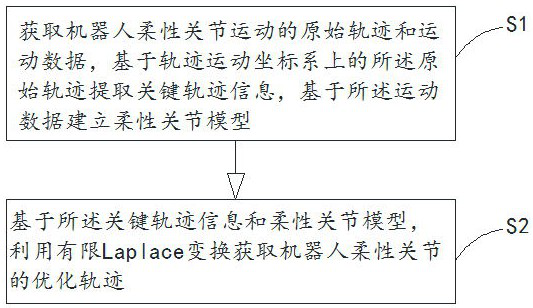
[0059] like figure 1 As shown, the method for suppressing flexible joint shaking based on trajectory optimization control in this embodiment includes: S1-S2
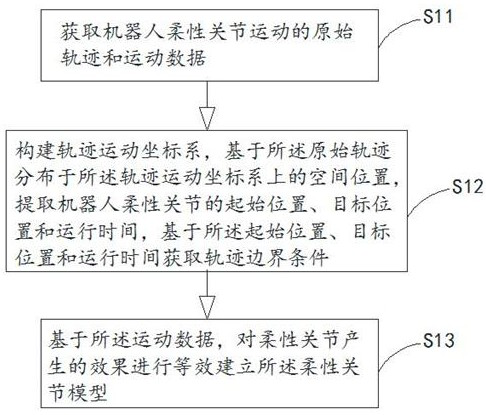
[0060]S1, obtain the original trajectory and motion data of the robot flexible joint motion, extract key trajectory information based on the original trajectory on the trajectory motion coordinate system, and establish a flexible joint model based on the motion data;
[0061] S2. Based on the key trajectory information and the flexible joint model, use the finite Laplace transformation to obtain the optimized trajectory of the robot flexible joint.
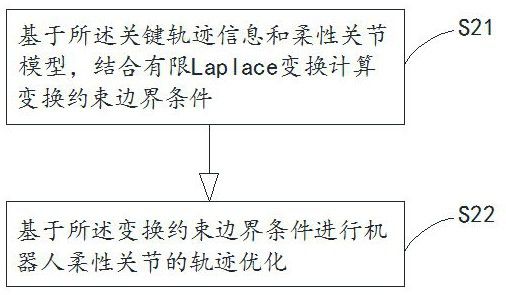
[0062] further, as figure 2 As shown in step S2, based on the key trajectory information and the flexible joint model, the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More