

Grasp and suction dual-functional underwater electric manipulator
An electric manipulator, dual-function technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the troublesome problems of changing different fingers, and achieve the effect of convenient grasping and reliable sealing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
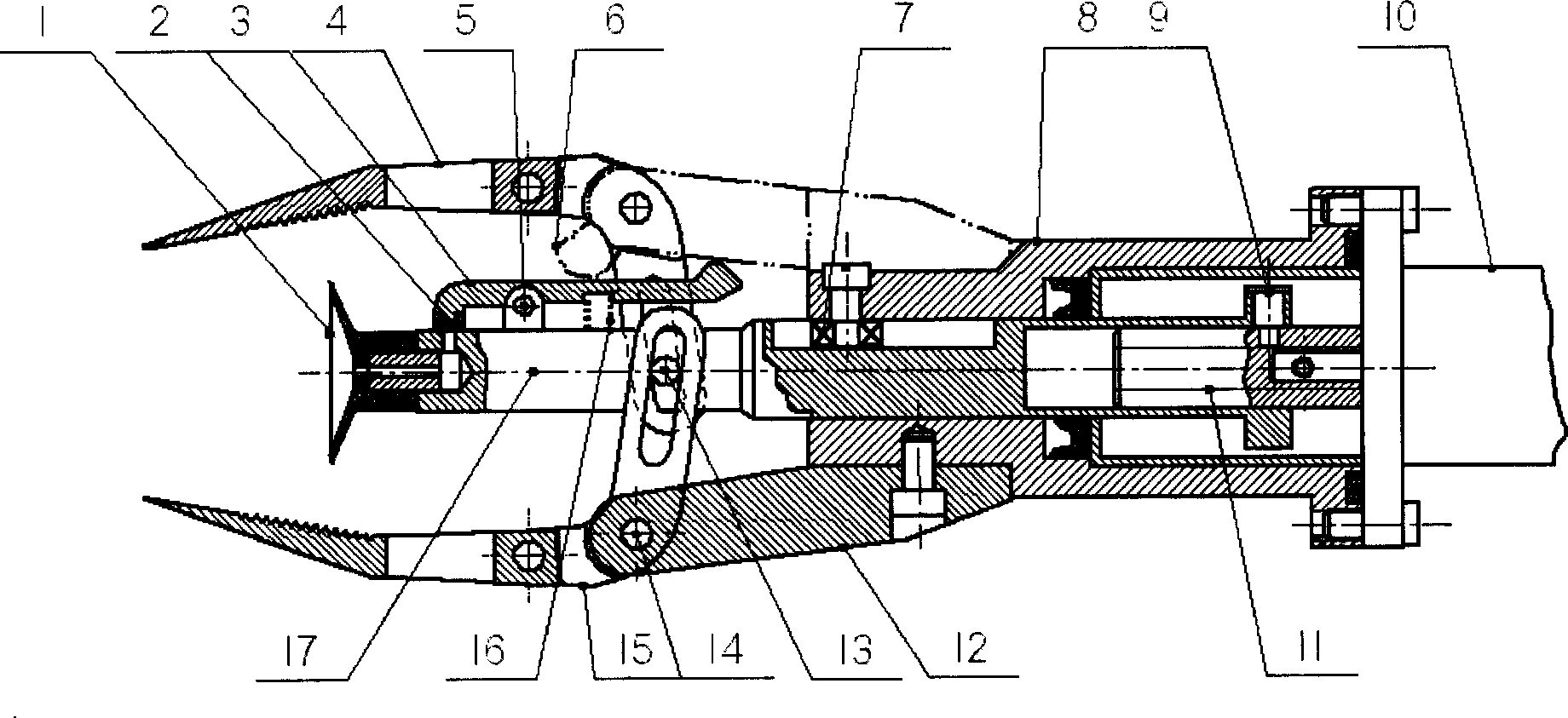
[0014] Such as figure 1 As shown, the present invention mainly includes: suction cup 1, pressure release pad 2, pole 3, clamp finger 4, rotating shaft-5 clamp finger seat block 6, guide bearing 7, clamp seat 8, dial nail 9, motor 10, transmission Screw rod 11, clip finger seat 12, rotating shaft two 13, rotating shaft three 14, clip finger arm 15, clip spring 16 and transmission shaft 17 are formed, and the shaft of motor 10 is fastened together with transmission screw rod 11 by pin, and clip seat 8 and clip The finger base 12 is fixed and serves as the base of the entire manipulator for the fixing of other parts. The motor 10 and the transmission shaft 17 are connected to the dial nail 9 respectively in spiral grooves. When the motor 10 rotates, the transmission shaft 17 is driven by a screw drive. For axial telescopic movement, one end of the clamping finger arm 15 is connected with the clamping finger base 12 by the rotating shaft 3 14, which can rotate around the axis, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More