

Threading holder of sewing machine
A technology of clamping mechanism and sewing machine, which is applied to the mechanism of cutting thread in sewing machine, sewing machine components, sewing equipment, etc., and can solve the problems of complex structure of upper thread clamping components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Refer below Figure 1 to Figure 12 Examples of the present invention will be described.
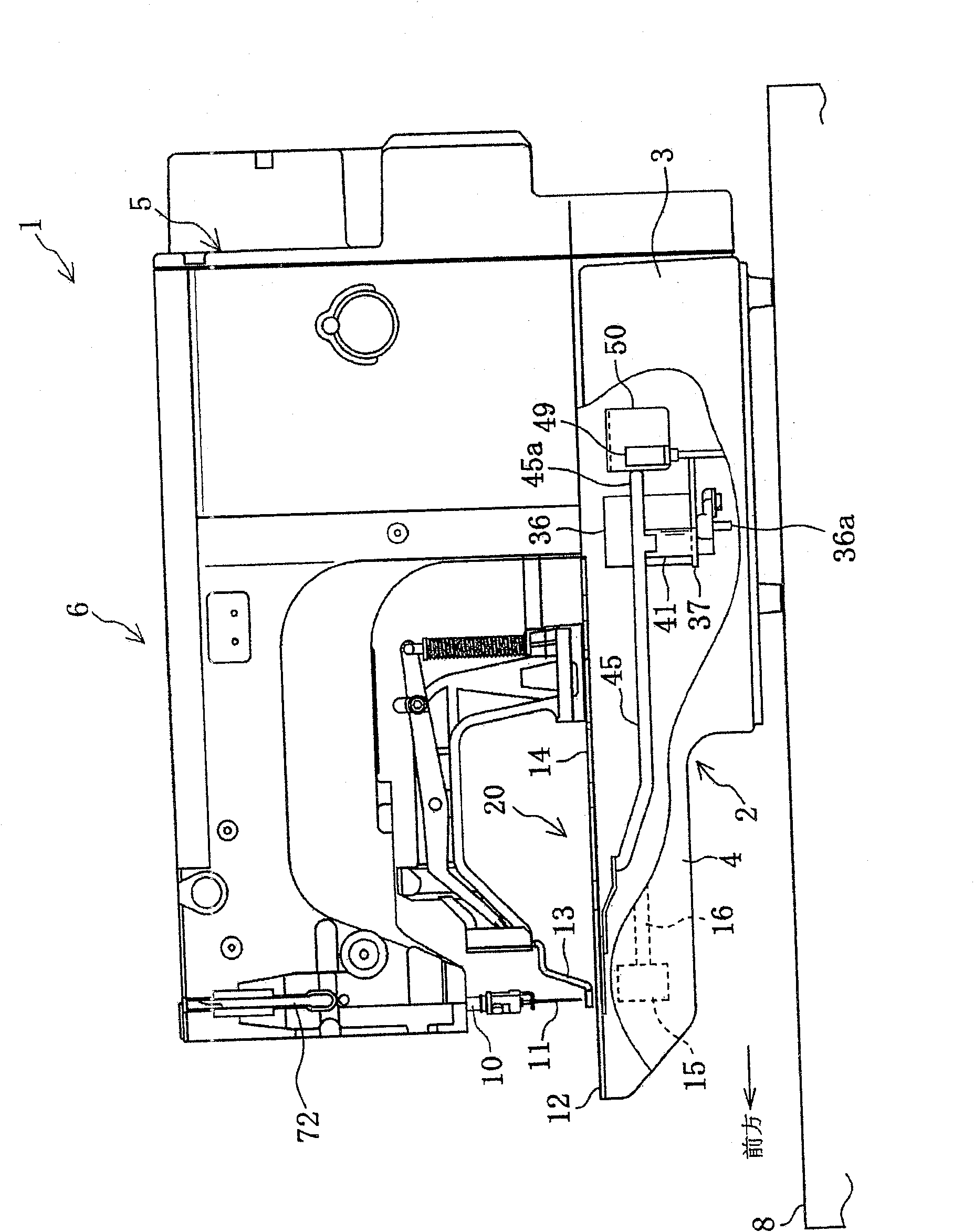
[0020] Such as figure 1 As shown, the electronic bartack reinforcement sewing machine 1 is set on the workbench 8 . This electronic bar tack reinforcement sewing machine 1 is composed of a base plate 2, a pillar portion 5 extending upward from the rear end of the base plate 2, and an arm portion 6 extending forward from the upper end of the pillar portion 5. The arm portion 6 is connected to the base plate. The upper part of part 2 faces. The bottom plate portion 2 and the arm portion 6 are relatively long in the front-rear direction and relatively short in the left-right direction.
[0021] An operation panel 9 is attached to the workbench 8 . The operation panel 9 is equipped with a liquid crystal display 9a, a selector switch 9b for selecting the type of tack reinforcement stitches and the pattern of the tack reinforcement stitches, and whether to set the end of the upper th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More