

Two rotation decoupling parallel robot mechanism
A robot and parallel technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large cumulative errors, poor processing and assembly, and many branch motion pairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
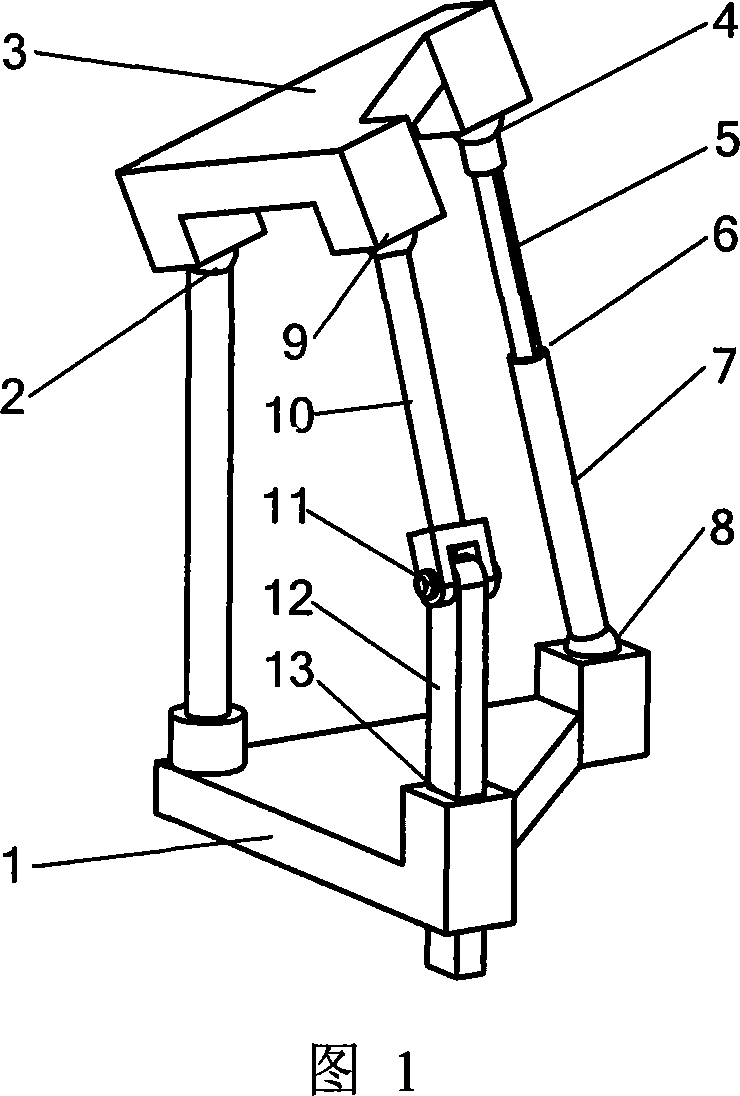
[0016] The moving platform 3 of this mechanism is connected with the fixed platform 1 through 3 branches (see Figure 1). There is only one ball pair 2 in the first branch. The ball pair 9 of the second branch connects the moving platform 3 and the connecting rod 10 , the rotating pair 11 connects the connecting rod 10 and the connecting rod 12 , and the connecting rod 12 is connected with the fixed platform 1 through the moving pair 13 . The first branch and the second branch form a planar guide rod mechanism. The ball pair 4 of the third branch connects the moving platform 3 and the connecting rod 5 , the moving pair 6 connects the connecting rod 5 and the connecting rod 7 , and the connecting rod 7 is connected with the fixed platform 1 through the ball pair 8 .
Embodiment 2
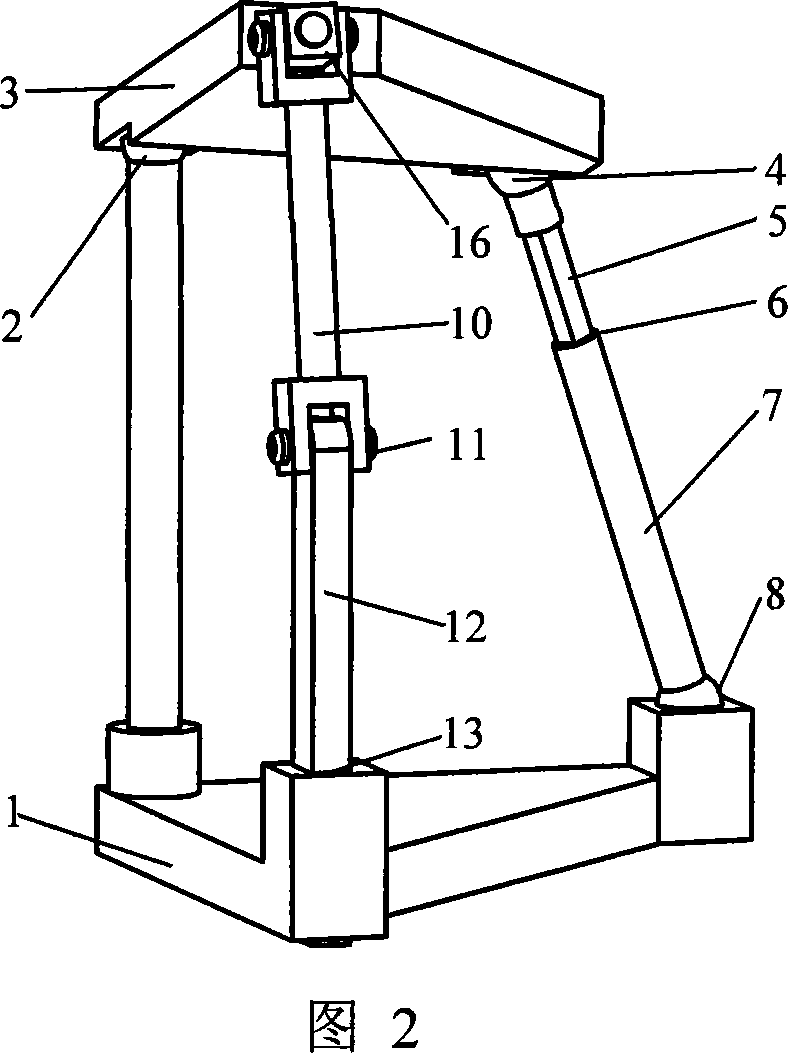
[0018] The moving platform 3 of this mechanism is connected with the fixed platform 1 through 3 branches (see Figure 2). There is only one ball pair 2 in the first branch. The Hooke hinge 16 of the second branch connects the moving platform 3 and the connecting rod 10, the rotating pair 11 connects the connecting rod 10 and the connecting rod 12, and the connecting rod 12 is connected with the fixed platform 1 through the moving pair 13, wherein one of the Hooke hinge 16 The axis passes through the center of the ball pair 2, and the other axis of the Hooke hinge 16 is parallel to the axis of the rotating pair 11. The first branch and the second branch form a planar guide rod mechanism. The ball pair 4 of the third branch connects the moving platform 3 and the connecting rod 5 , the moving pair 6 connects the connecting rod 5 and the connecting rod 7 , and the connecting rod 7 is connected with the fixed platform 1 through the ball pair 8 .
Embodiment 3
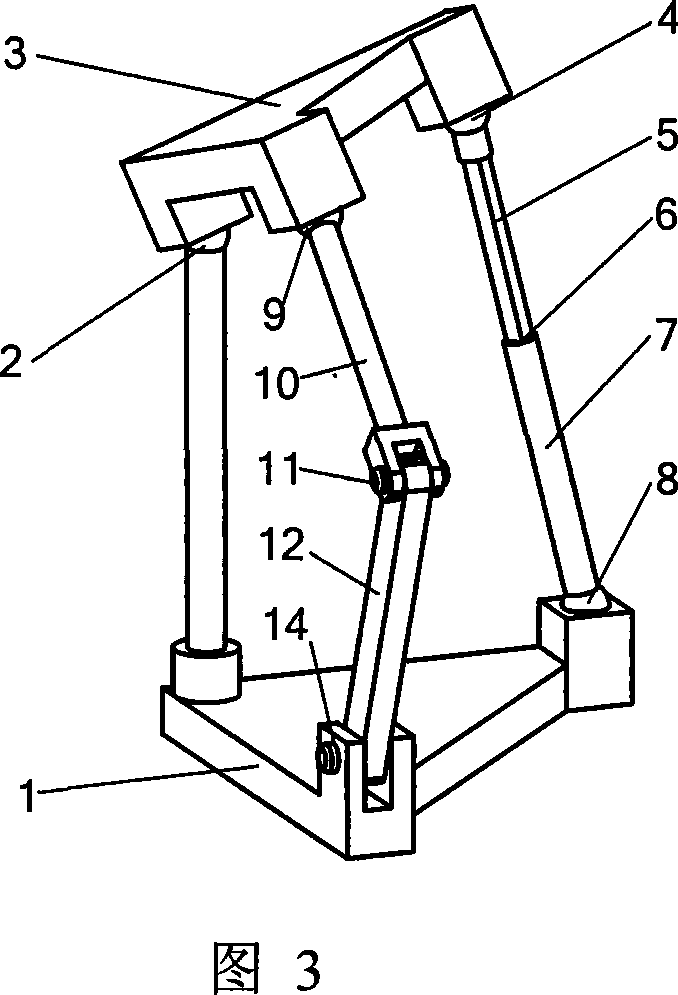
[0020] The moving platform 3 of this mechanism is connected with the fixed platform 1 through 3 branches (see Figure 3). There is only one ball pair 2 in the first branch. The ball pair 9 of the second branch connects the moving platform 3 and the connecting rod 10, and the rotating pair 11 connects the connecting rod 10 and the connecting rod 12, and the connecting rod 12 is connected with the fixed platform 1 through the rotating pair 14, wherein the axis of the rotating pair 14 is connected with the rotating The axes of the vice 11 are parallel. The first branch and the second branch constitute a planar hinge mechanism. The ball pair 4 of the third branch connects the moving platform 3 and the connecting rod 5 , the moving pair 6 connects the connecting rod 5 and the connecting rod 7 , and the connecting rod 7 is connected with the fixed platform 1 through the ball pair 8 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More