

Robotic programming control using multiple binary input
A robotic, binary technique applied in the field of programming to solve problems such as increasing cost and time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
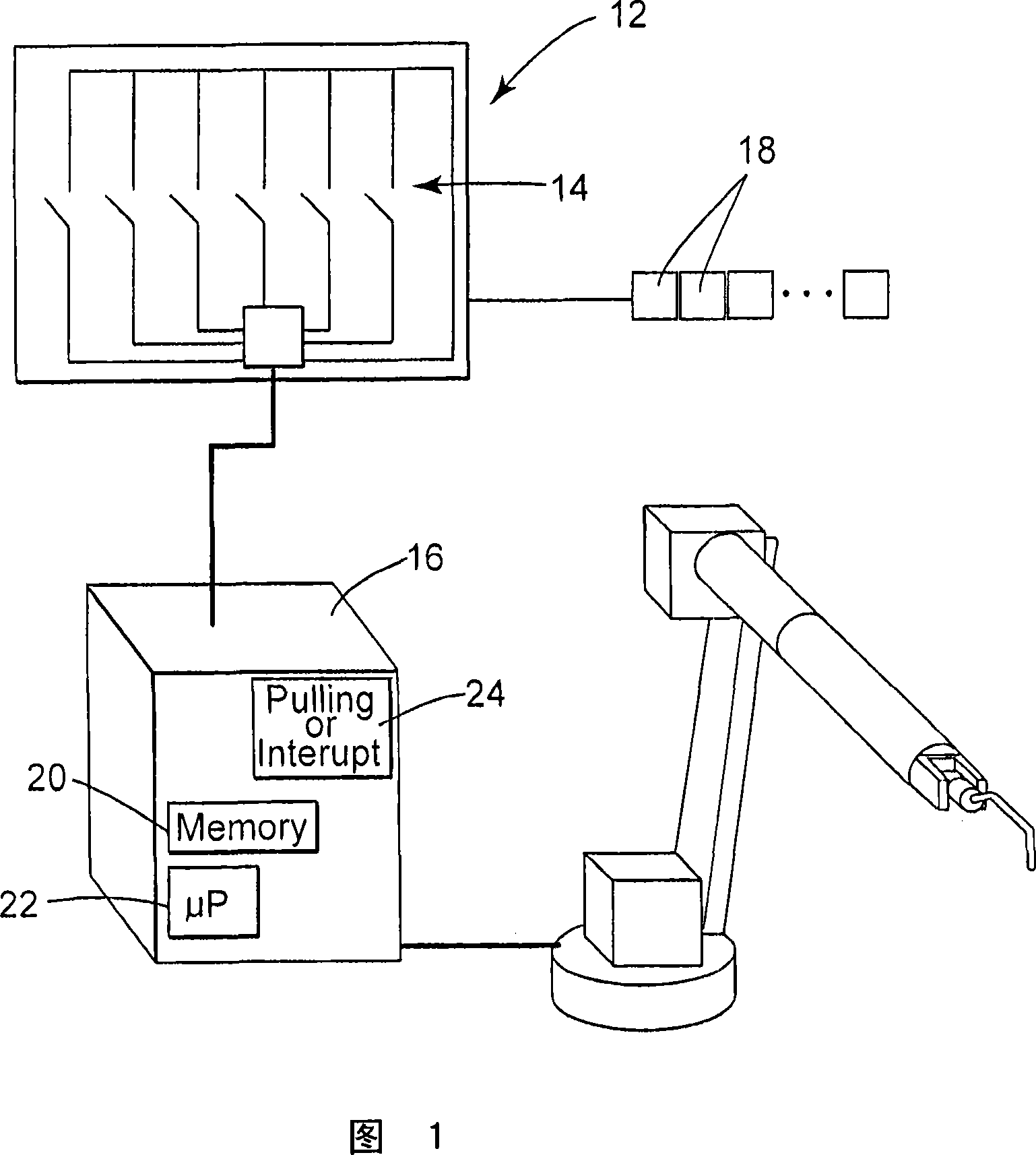
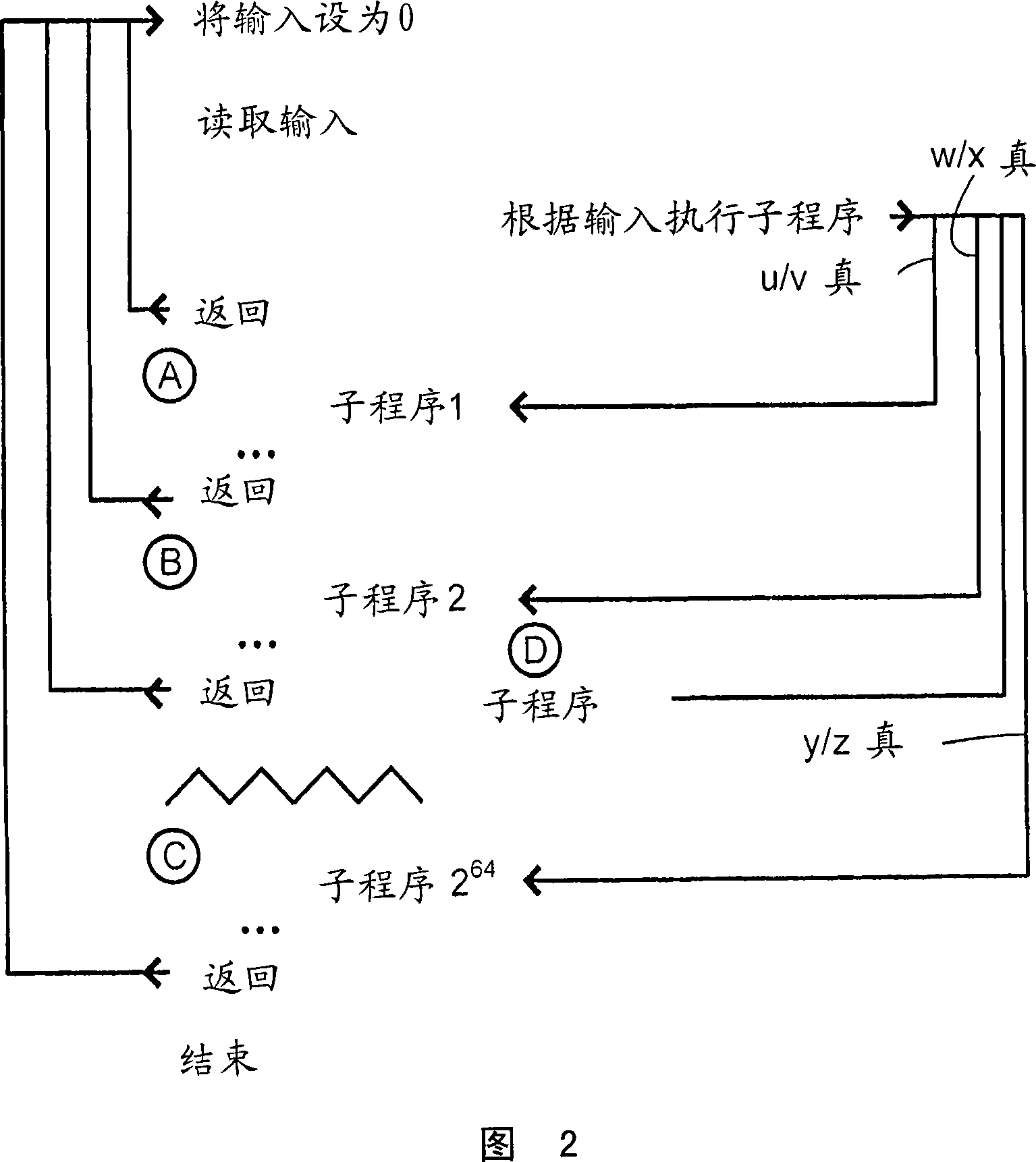
[0007] The programming method described here for robot control uses external binary inputs rather than fixed motion control and PLC software. Typically, the robot performs a cyclic process in which it checks whether a binary coded input has been set; if so, the robot performs the steps required by the input. Then it enters the loop again to detect another input.
[0008] Basically, the method exploits the robot's processing speed to infinitely execute short programs that integrate and compose synthetic complete programs in real time. This allows for modifications or additions to the programmed executable operations, which in the case of an arc welding robot can include modifying the torch pose / angle, initiating arc start / stop, point-to-point moves, etc., which occur sequentially and can be performed flexibly Modified to suit the application at hand. Inputs to the binary input string can come from switch boxes, joystick controllers, sensors, and / or external computer controls ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More