

Freedom positioning system for robot
A technology for autonomous positioning and robotics, applied in positioning, radio wave measurement systems, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
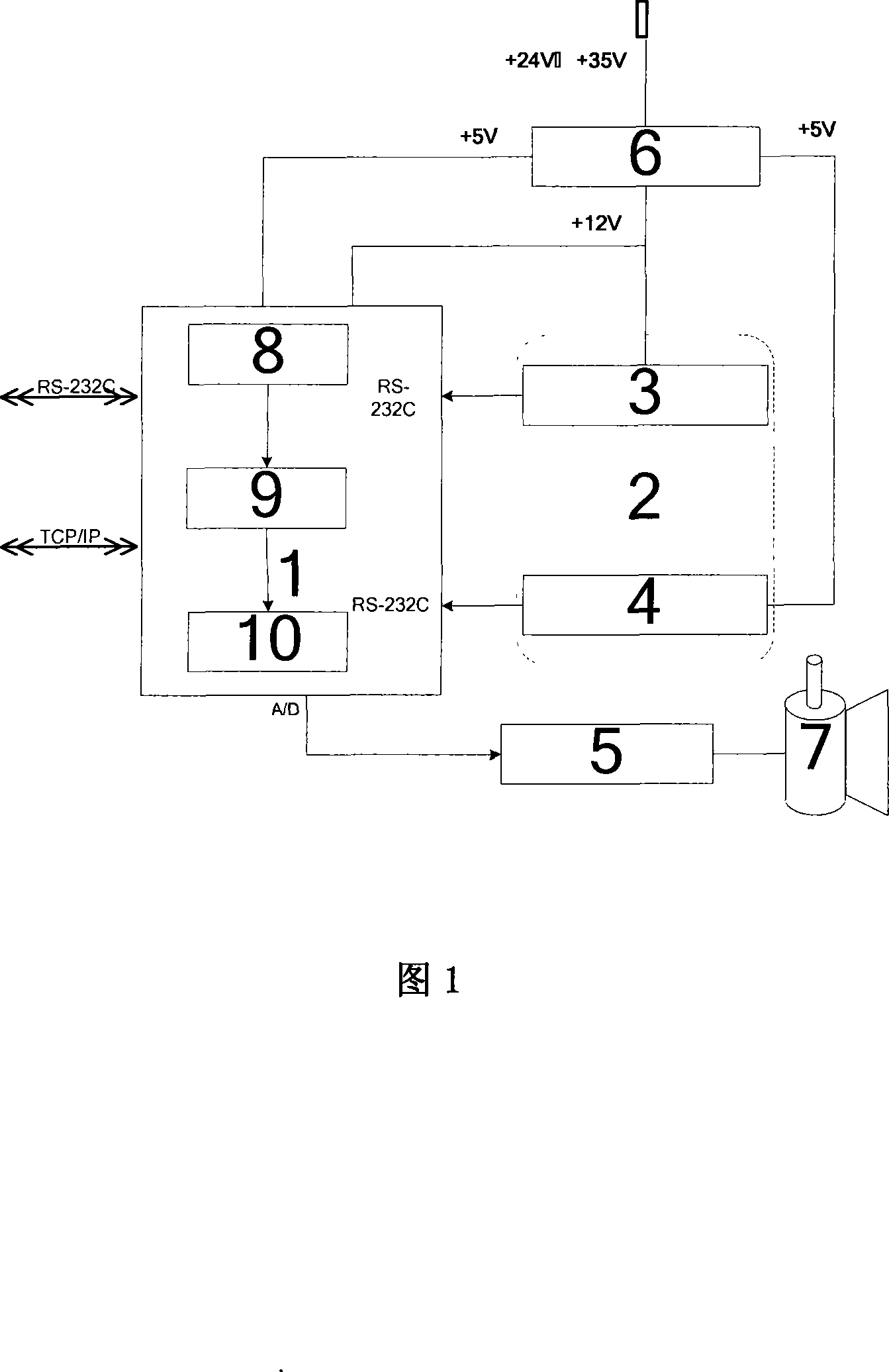
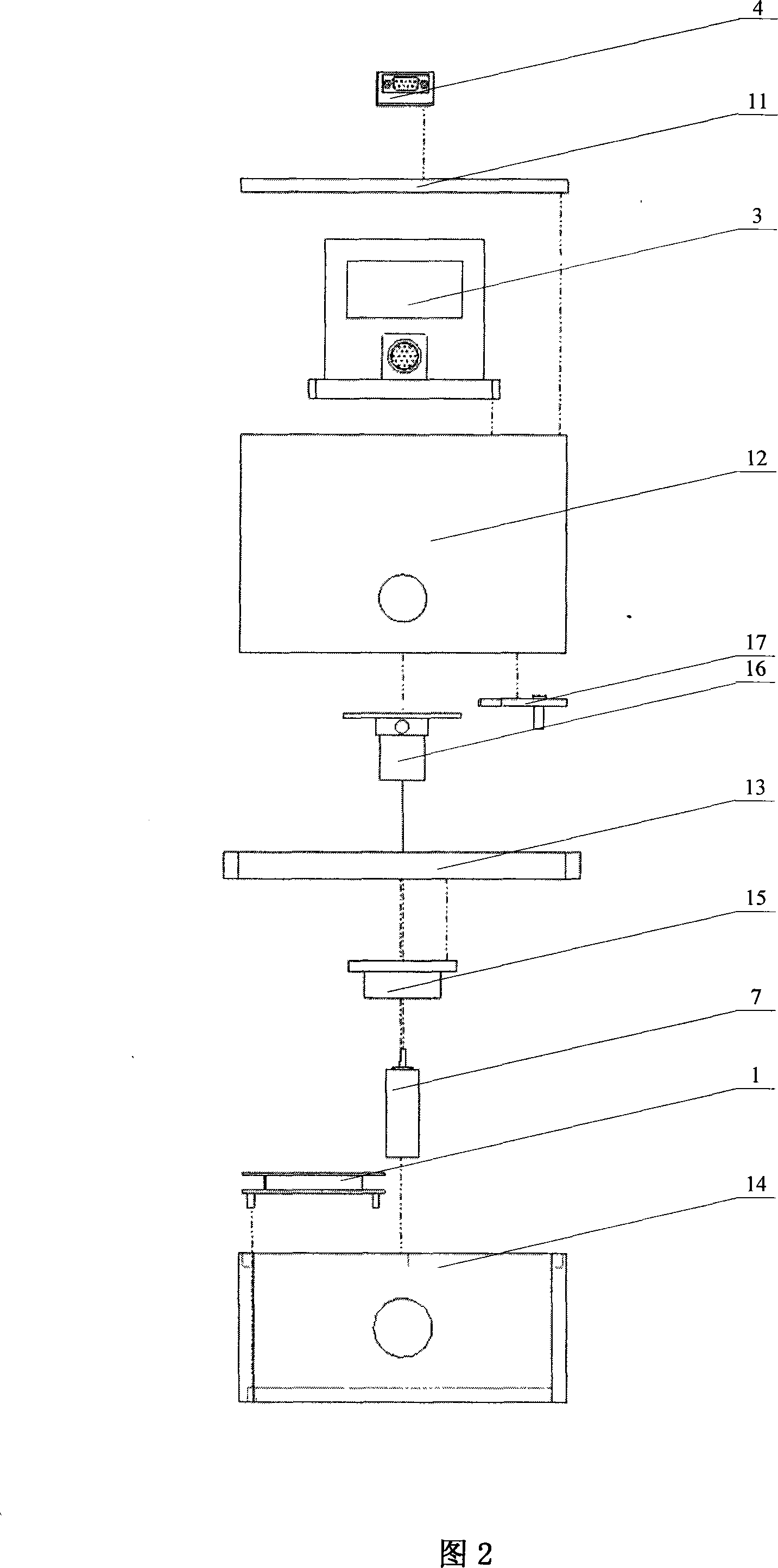
[0034] Fig. 1 is the overall block diagram of the present invention, and the present invention comprises installation platform, the sensor subsystem that is arranged on the installation platform, data processing subsystem and voltage conversion module, the central controller 1 of data processing subsystem has RS-232 interface and Ethernet Network interface, using these interfaces, the autonomous positioning system transmits the robot positioning information to the designated device in real time; the central controller 1 is equipped with a data preprocessing module 8, a data fusion module 9 and a dead reckoning module 10. The sensor subsystem 2 includes an inertial sensor module 3 and a three-dimensional digital compass 4. The inertial sensor module 3 and the three-dimensional digital compass 4 are respectively integrated with internal processors. The internal processor converts the sensor measurement data into digital signals that can be directly transmitted and processed by the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More