

Calculation method of object directional positioning angle of aerial remote sensor
A technology of aerial remote sensing and calculation method, which is applied in the calculation field of target pointing and positioning angle, can solve the problem of difficult target pointing and positioning angle due to the monotonically increasing characteristic of tangent function, and achieves the effect of realizing rapidity and accuracy and reducing calculation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0021] The specific embodiment one, the computing method of aerial remote sensor target pointing location angle, this method is realized by the following steps:
[0022] Step 1, using the method of coordinate translation to convert the coordinates of the target to be photographed under the geographic coordinate system to the coordinates under the aircraft coordinate system where the aerial remote sensor is located, the coordinate calculation formula of the target to be photographed under the aircraft coordinate system is used Formula 1 is expressed as:
[0023] Formula one:
[0024] In the formula: γ is the heading angle, θ is the pitch angle, is the rolling angle; (X 0 , Y 0 ,Z 0 ) is the geographic coordinates of the location of the aerial remote sensor; (x, y, z) is the coordinates of the target to be photographed in the geographic coordinate system; (x', y', z') is the coordinate of the target to be photographed in the aircraft coordinate system coordinate of;
[...
specific Embodiment approach 2
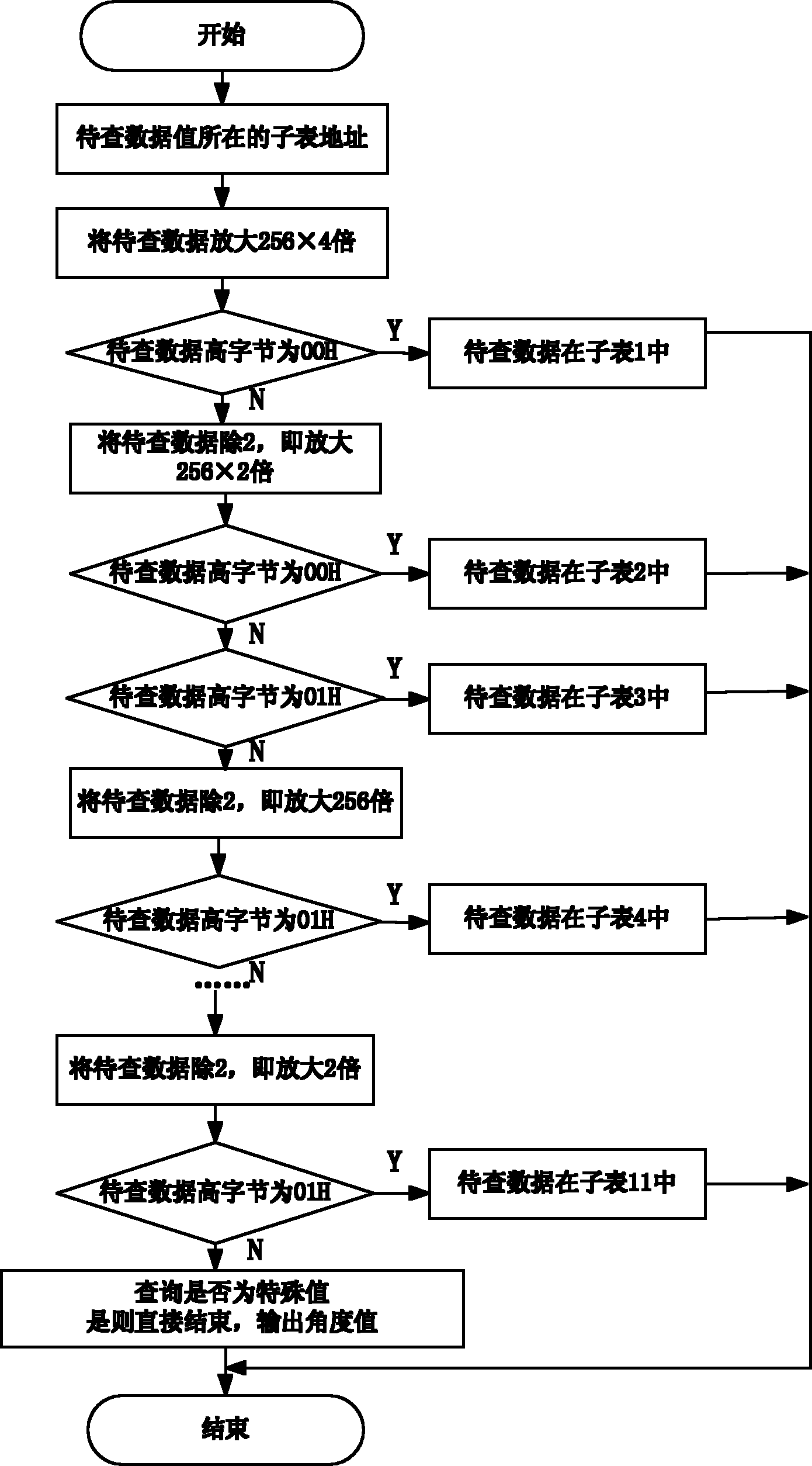
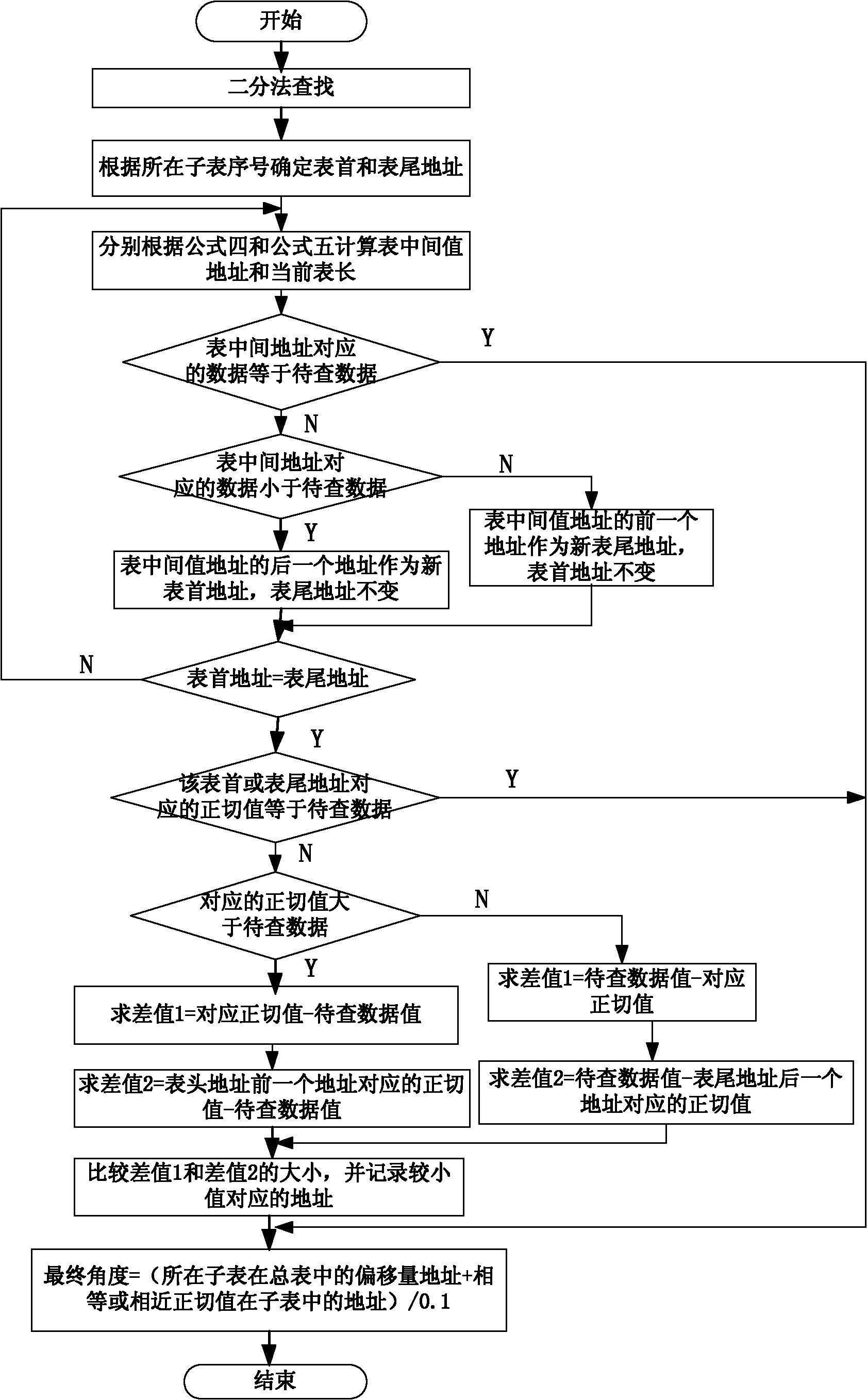
[0039] Specific embodiment two, combine figure 1 and figure 2 Describe this implementation mode, this implementation mode is the embodiment of the calculation method of the target pointing positioning angle when the aerial remote sensor imaging described in the specific implementation mode one:
[0040] Step a1, according to
[0041] Formula one:
[0042] After calculating the coordinates (x′, y′, z′) of the target to be photographed in the aircraft coordinate system, according to formula 2 and formula 3
[0043] Formula two: α = arctan x ′ z ′
[0044] Formula three: β = arctan ( y ′ x ′ 2 + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More