

Multi-target tracking method by taking depth as leading clue under dynamic scene
A multi-target tracking and dynamic scene technology, which is applied in image data processing, instrumentation, computing, etc., can solve the problems of limited mining of depth information advantages and no clear role of depth information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
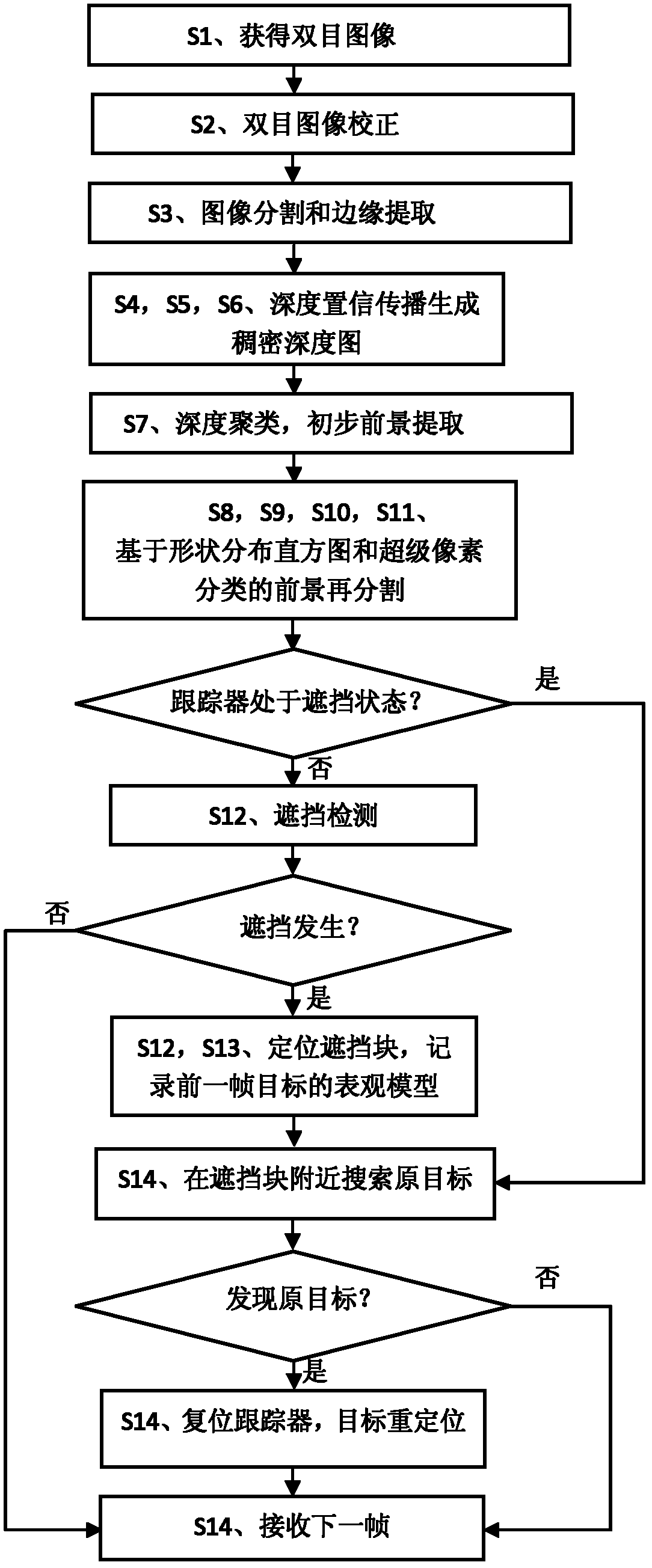
[0058] see figure 1 , the implementation of the embodiment of the present invention includes the following steps:
[0059] S1. Use an external trigger source to trigger the binocular camera to simultaneously collect image sequence frames at time t, and then transfer the image data to the computer cache in real time. The binocular camera can work in most environments because it only takes color information, and can be built on a stationary or mobile platform. It should be noted that since the depth algorithm requires the binocular images to have a large overlapping area for the stereo matching algorithm to find corresponding points, there needs to be a relatively small distance between the binocular cameras and they should be placed in parallel.
[0060] S2. After obtaining the current binocular image, correct the binocular image according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More