

Trainer for simulating operation of obstetric forceps, and method for operating trainer
A training device and technology for puerperae, applied in the field of medical devices, can solve the problems of poor teaching and training effect, lack of evaluation standards and feedback channels for forceps operation technology, and only learning in the delivery room.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with drawings and embodiments.
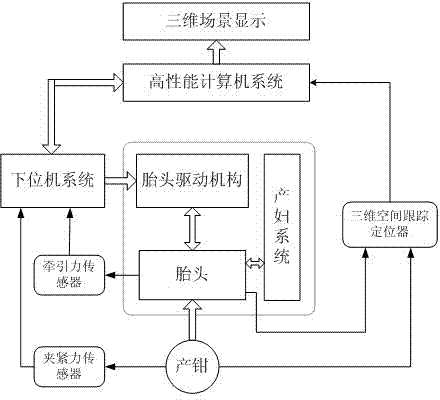
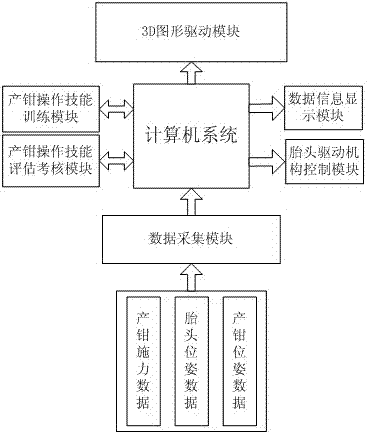
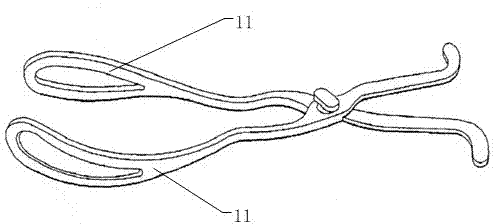
[0031] The forceps operation simulation trainer is characterized in that it includes a high-performance computer system and a display device, a lower computer system, a maternity system, a fetal system, and a forceps system. The high-performance computer system is composed of a hardware system and a software system. The software system includes a three-dimensional scene model and The control program, the display device is a projector or a large-screen high-resolution display, the lower computer system is composed of a controller and peripheral circuits, the maternity system is composed of a maternal pelvic cavity model and several airbags for simulating the pelvic cavity and birth canal muscles, and the fetal system includes Fetal model with fetal head, fetal head three-dimensional space tracking locator, traction force sensor, joint connection device and driving device....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More