

Traffic-priority-based lane change danger collision avoiding method
A priority and vehicle technology, applied in the field of intelligent transportation, can solve problems such as difficulty in obtaining accurate driving information of surrounding vehicles, lack of vehicle-vehicle information interaction and interaction, and impact judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
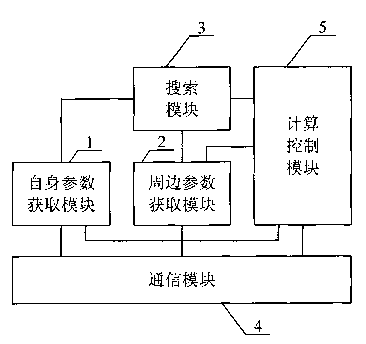
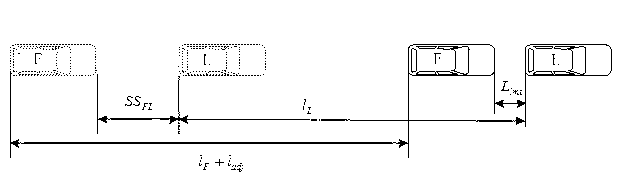
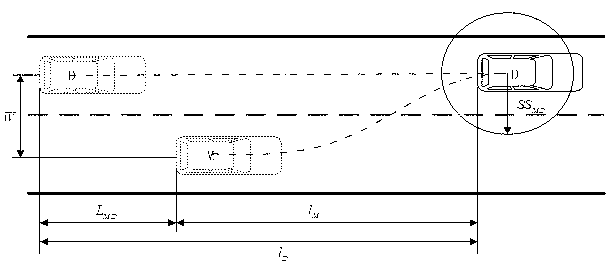
[0092] The present invention transmits the posture of the self-vehicle to the surrounding vehicles through the vehicle-vehicle information interaction, and according to the posture parameters between the self-vehicle and the front and rear vehicles, warns the driver of danger in the process of changing lanes and eliminates such danger. The method of real-time acquisition of attitude is an existing technology. During implementation, the real-time acquisition of the on-board vehicle information collection equipment can be used to collect the front of the vehicle and the rear of the front vehicle, and the projected distance l (unit m) between the rear of the vehicle and the front of the rear vehicle in the direction of the road. , collect the vehicle instantaneous velocity v (unit m / s) and acceleration a (unit m / s) through the vehicle CAN bus 2 ). Through vehicle-to-vehicle information interaction, the information of this vehicle is transmitted to other vehicles. The on-board ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More