

Multi-element touch sense interactive perceiving system with temperature perceiving function
A technology of perception function and perception system, applied in the field of human-machine intelligent control and sensing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
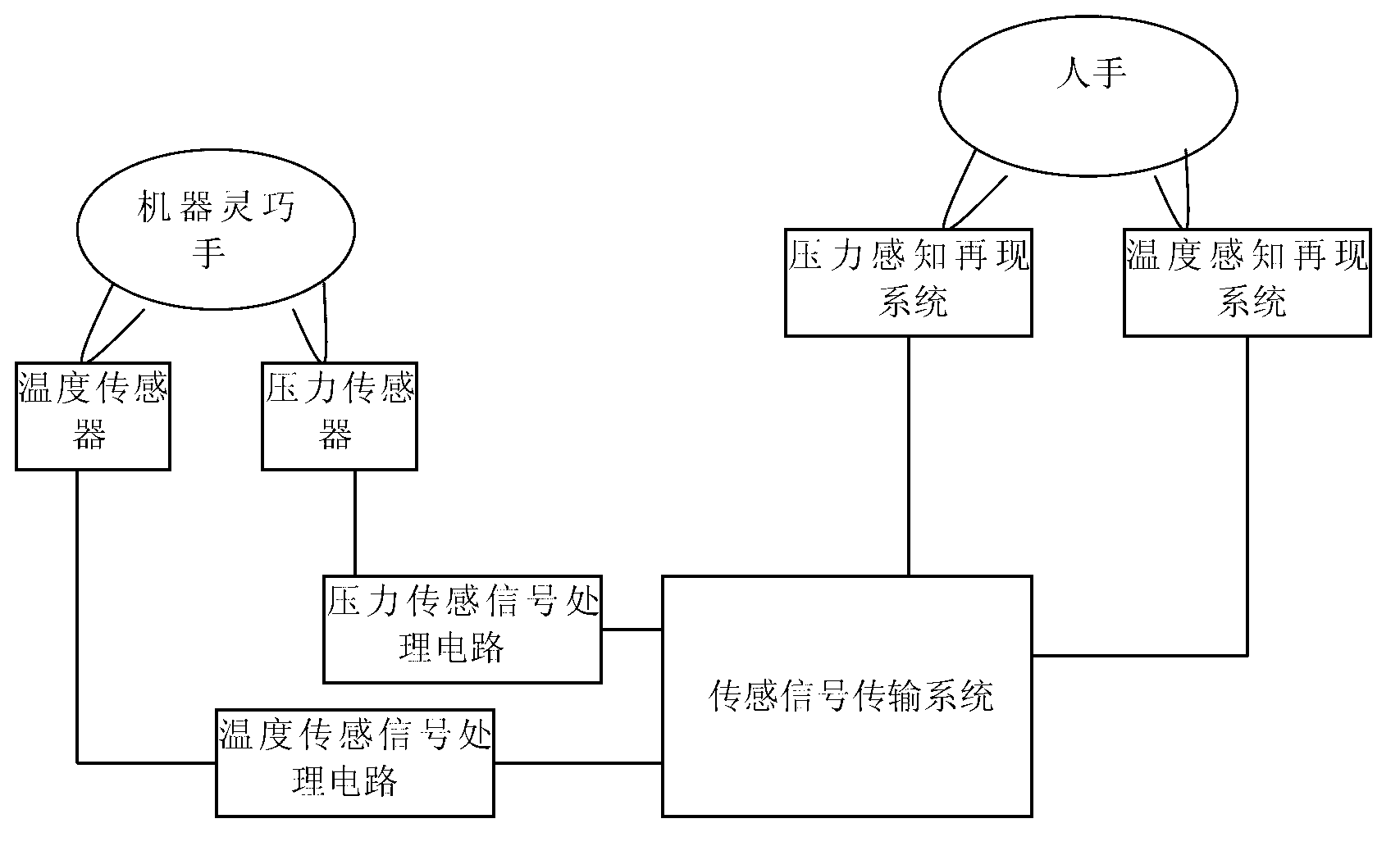
[0018] Such as figure 1 As shown, the multi-tactile interactive sensing system proposed by the present invention includes a robotic dexterous hand, a temperature sensor, a pressure sensor, a pressure sensing signal processing circuit, a sensing signal transmission system, a temperature sensing reproduction system and a pressure sensing reproduction system. Among them, the robotic dexterous hand is used to perform various actions in the actual environment, and temperature sensors and pressure sensors are fixedly installed on the robotic dexterous hand to collect temperature signals and pressure signals of the environment where the robotic dexterous hand is located.
[0019] The temperature sensor collects the temperature signal of the environment where the dexterous hand of the robot is located, and the pressure sensor collects the pressure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More