

Motion instant center adjustable type prosthetic multiaxial joint
A shaft joint, adjustable technology, applied in the fields of biomedical engineering and rehabilitation aids, can solve the problems of increasing the economic burden of patients and small application scope.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention provides a prosthetic multi-axis joint with adjustable instantaneous center of movement. The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
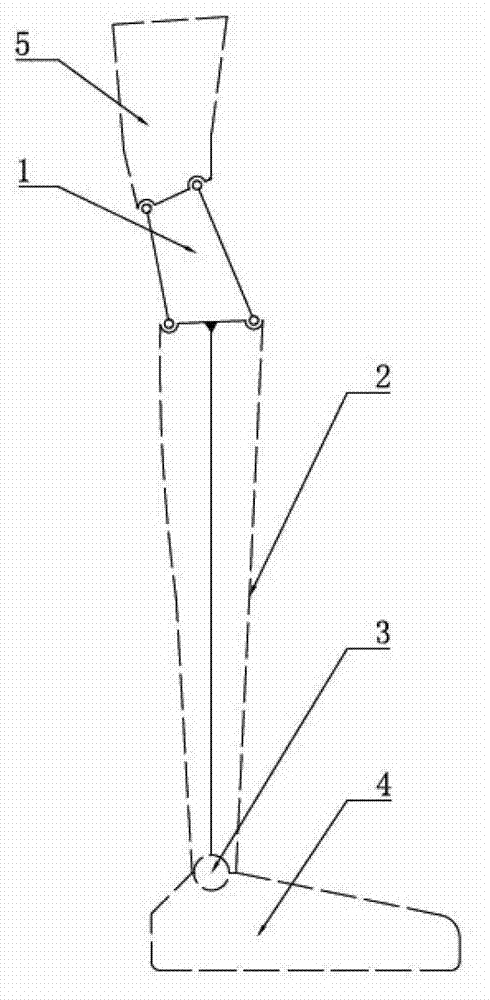
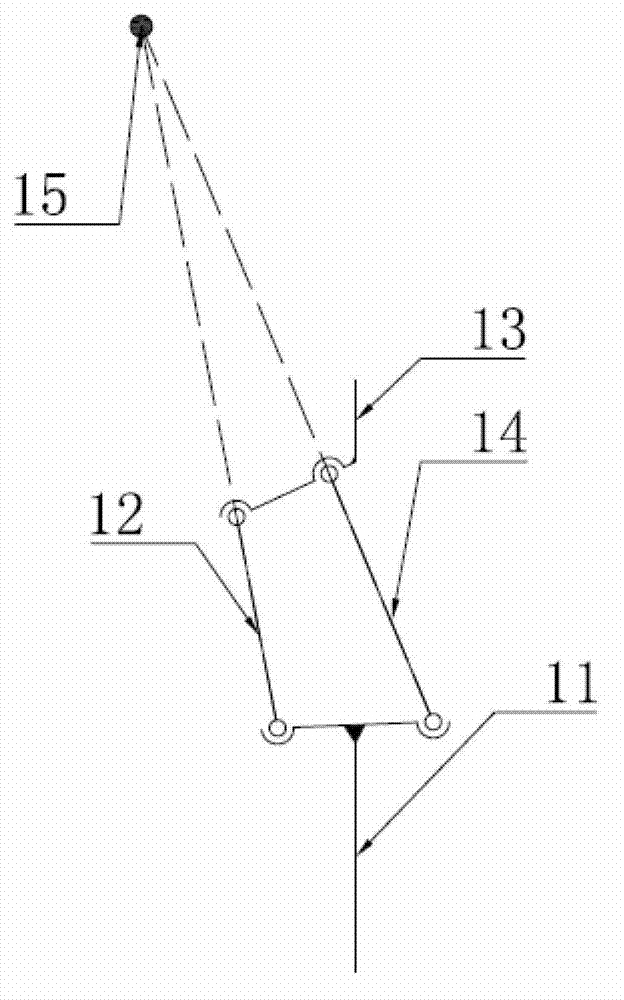
[0019] Such as figure 1 As shown in FIG. 2( a ), the multi-axis joint 1 is composed of a lower leg connecting rod 11 , a joint rear arm 12 , an upper joint body 13 and a joint forearm 14 . Among them, the four components are hinged in pairs to form a multi-axis mechanism as shown in the figure. The schematic diagram of the joints of the four-bar mechanism is given in the legend. The intersection point of the extension line of the axes of the articulated rear arm 12 and the articulated forearm 14 in the motion plane is the instantaneous center of motion 15 of the prosthesis. To realize the motion of the prosthetic joint, the shank connecting rod 11 is used as the frame of the four-bar mechanism joint, and the upper joint body 13 is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More