

Test method of position accuracy in thermal vacuum tank of space manipulator
A space manipulator, precision testing technology, applied in measurement devices, electrical devices, instruments, etc., can solve the problem of low accuracy test of space manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
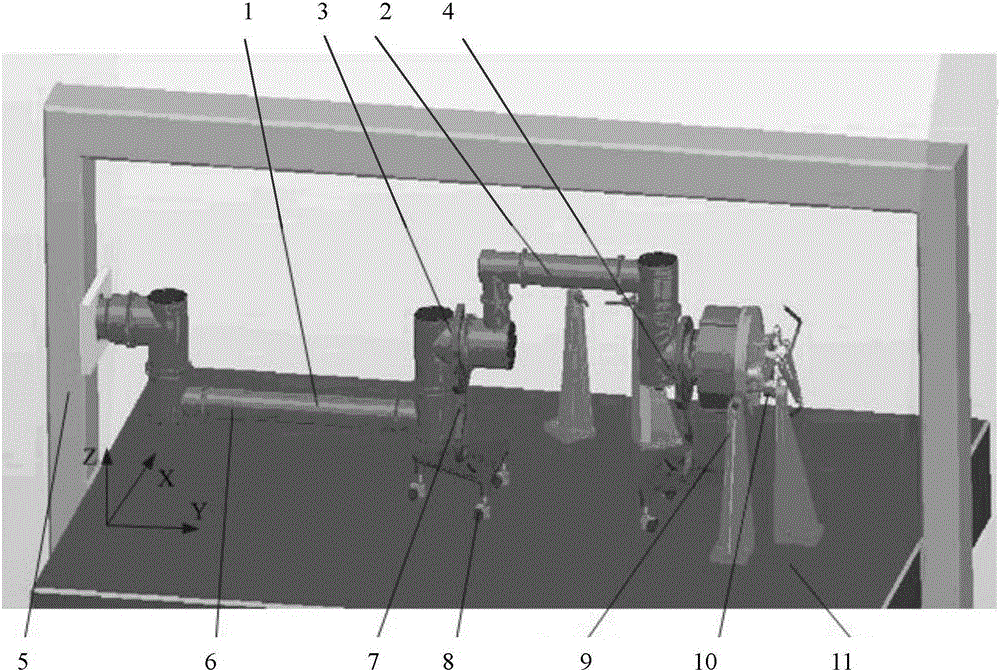
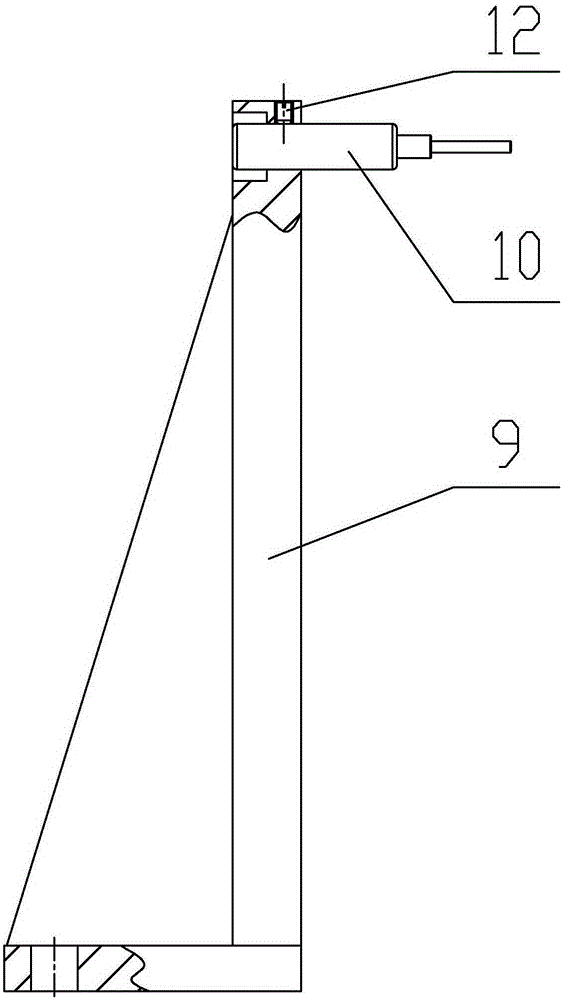
[0014] Specific implementation mode one: as Figures 1 to 3 As shown, a method for testing the position accuracy of a space manipulator in a thermal vacuum tank described in this embodiment is based on including a thermal vacuum tank and a mechanical arm mounting frame 5 located in the thermal vacuum tank, a steel plate 11, a roller 8, and a support frame 7 , guided rebound type LVDT displacement sensor 10 and the test system of the sensor fixing frame 9, the mechanical arm mounting frame 5 is fixedly connected to the steel plate 11, and the space manipulator 6 is placed on the steel plate 11 and is located in the mechanical arm mounting frame 5 , the base (root) flange of the space manipulator 6 is fixed on the inner wall of the corresponding side column of the manipulator mounting frame 5, and the space manipulator 6 is composed of the first arm 1, the first arm connected in sequence from the base end to the end The joint 3, the second arm bar 2 and the second joint 4 are fo...
specific Embodiment approach 2
[0019] Specific embodiment two: The LVDT displacement sensor 10 described in this embodiment is a guided rebound type LVDT displacement sensor with a relative accuracy of 0.05%, a resolution of 0.001 μm, an elastic force of less than 0.2N, and a temperature adaptable range of -40°C to 150°C. ℃. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0020] Specific implementation mode three: as Figures 1 to 3 As shown, the guided springback LVDT displacement sensor described in this embodiment has a relative accuracy of 0.05%, a resolution of 0.001 μm, an elastic force of less than 0.2N, and a temperature adaptable range of -40°C to 150°C. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More