

Human-simulated external skeleton robot assisting lower limbs
An exoskeleton robot, anthropomorphic technology, applied in the field of robotics, can solve the problems of high motor power demand, low motion space coupling, poor adaptability, etc., to achieve a good power assist effect and improve the effect of motion space coupling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
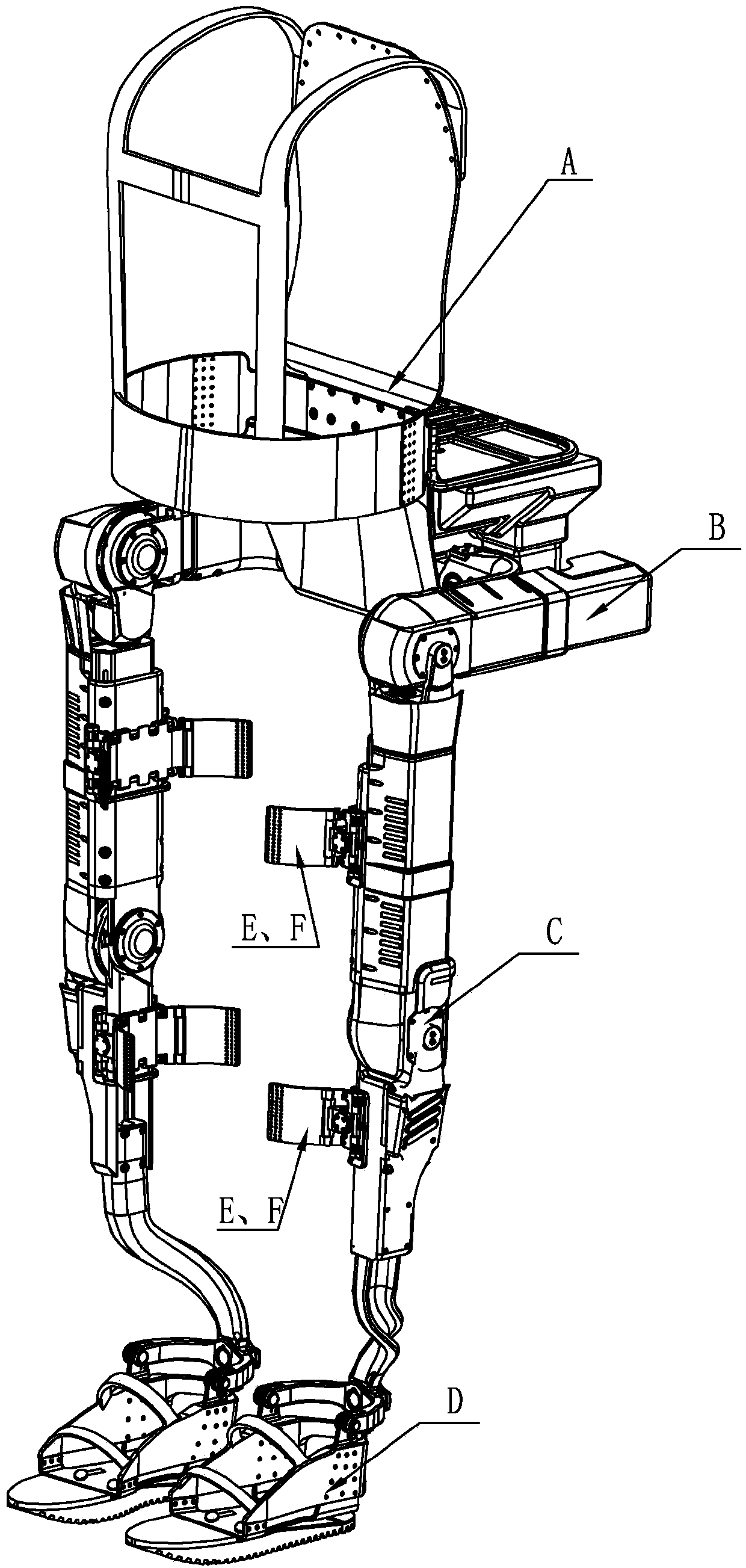
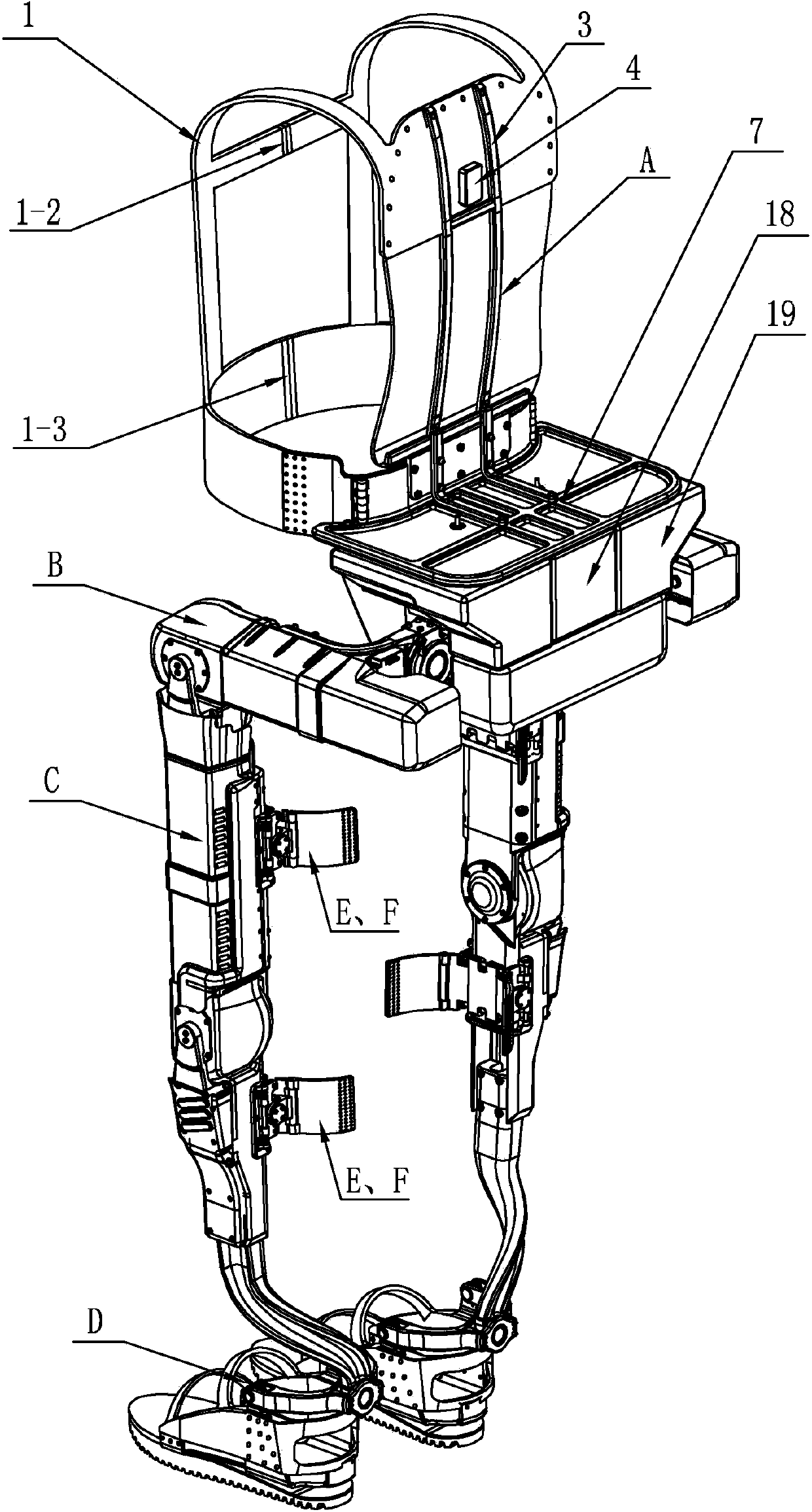
[0024] Specific implementation mode one: combine Figure 1 to Figure 19 Explain that an anthropomorphic lower limb power-assisted exoskeleton robot in this embodiment includes an upper body back A, a left leg and a right leg, and the left leg and the right leg respectively include a hip driving system B, a knee driving system C and a foot wear system D;
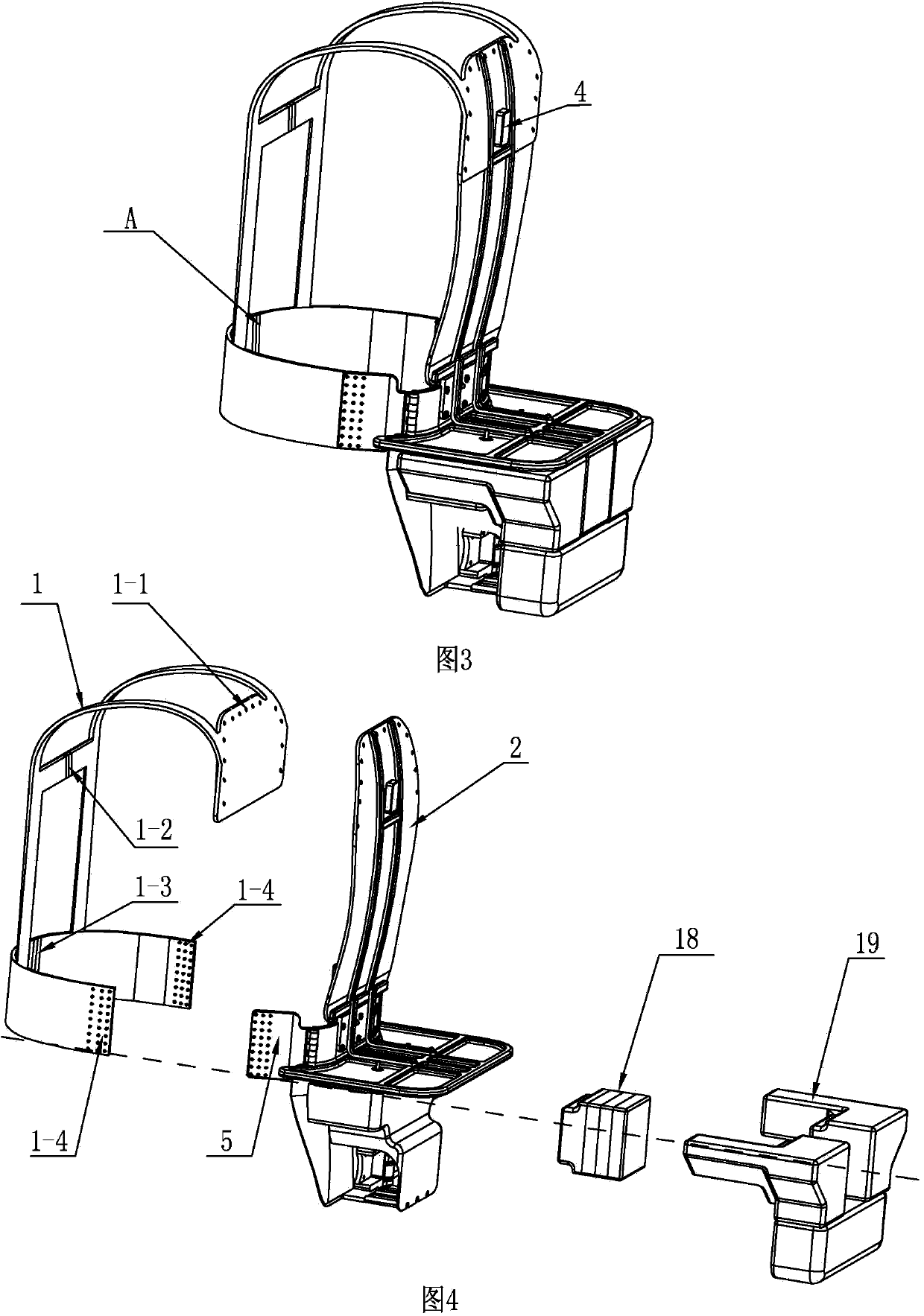
[0025] The back of the upper body A includes a cloth strap 1, a rubber back plate 2, a connecting plate 5, a load mounting plate 7, a waist rear connecting plate 9, a rotation limiting plate 10, a waist rear rotating shaft 12, a casing 17, a An inclination sensor 4, two legs connect the rotating plate 14 and two elastic parts 11; the load mounting plate 7 is arranged horizontally, the cover 17 is covered on the load mounting plate 7, the waist rear connecting plate 9, and the rotation limiting plate 10 , the rotating shaft 12 at the back of the waist, the two leg connecting rotating plates 14 and the two elastic parts 11 are...
specific Embodiment approach 2
[0037] Specific implementation mode two: combination Figure 5 and Figure 6 It is explained that the two elastic members 11 in this embodiment are both coil springs. Such setting can maintain the balance of the upper body and the back, which is beneficial to maintain the balance during walking. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0038] Specific implementation mode three: combination Figure 5 and Figure 6 Illustrate, the back A of the upper body described in this embodiment also includes two back reinforcement ribs 3, the two back reinforcement ribs 3 are curved back reinforcement ribs, and the two back reinforcement ribs 3 are installed on the back rubber plate On the back side of 2, the inner arc surfaces of the two back reinforcement ribs 3 are adjacent to the back rubber plate 2, and the lower ends of the two back reinforcement ribs 3 are respectively connected to the load mounting plate 7; It also includes a load transition plate 8 and a transition rotation shaft 8-1, the upper end of the load transition plate 8 is connected with the load mounting plate 7, and the lower end of the load transition plate 8 is rotationally connected with the waist rear connecting plate 9 through the transition rotation shaft 8-1. In this way, the back reinforcement rib 3 has a certain degree of curvature, which is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More