

driving aids
A driving assistance and driver's technology, which is applied in the direction of automatic starting devices, instruments, brakes, etc., can solve the problems of the driver's sense of incompatibility, the reduction of collision judgment accuracy, and the inability to calculate the speed, so as to ensure the effect of safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Hereinafter, embodiments of the driving assistance device will be described with reference to the drawings.
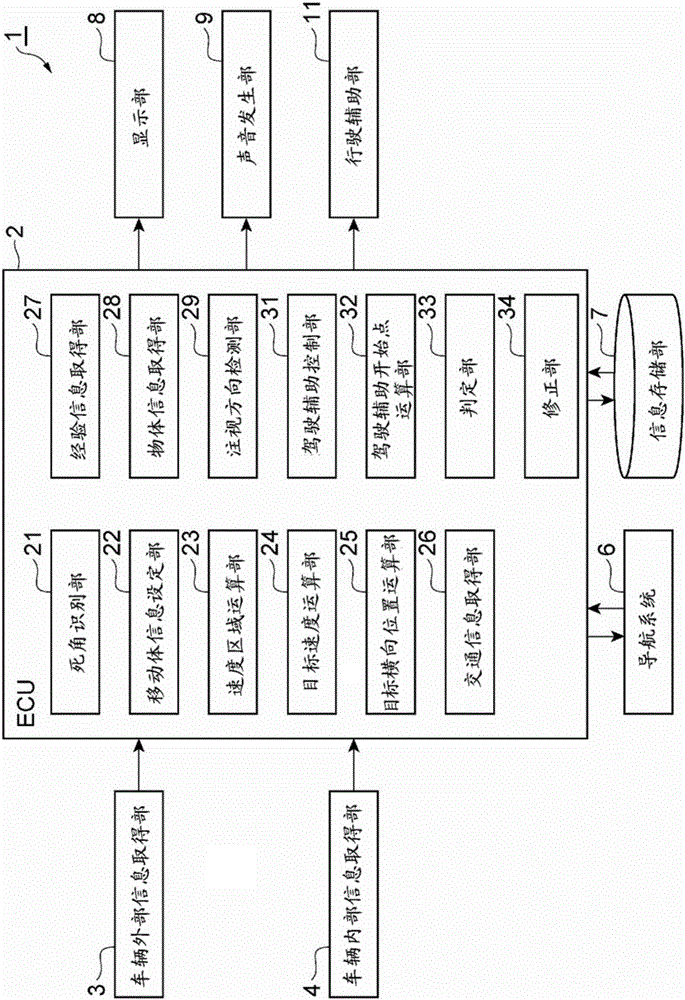
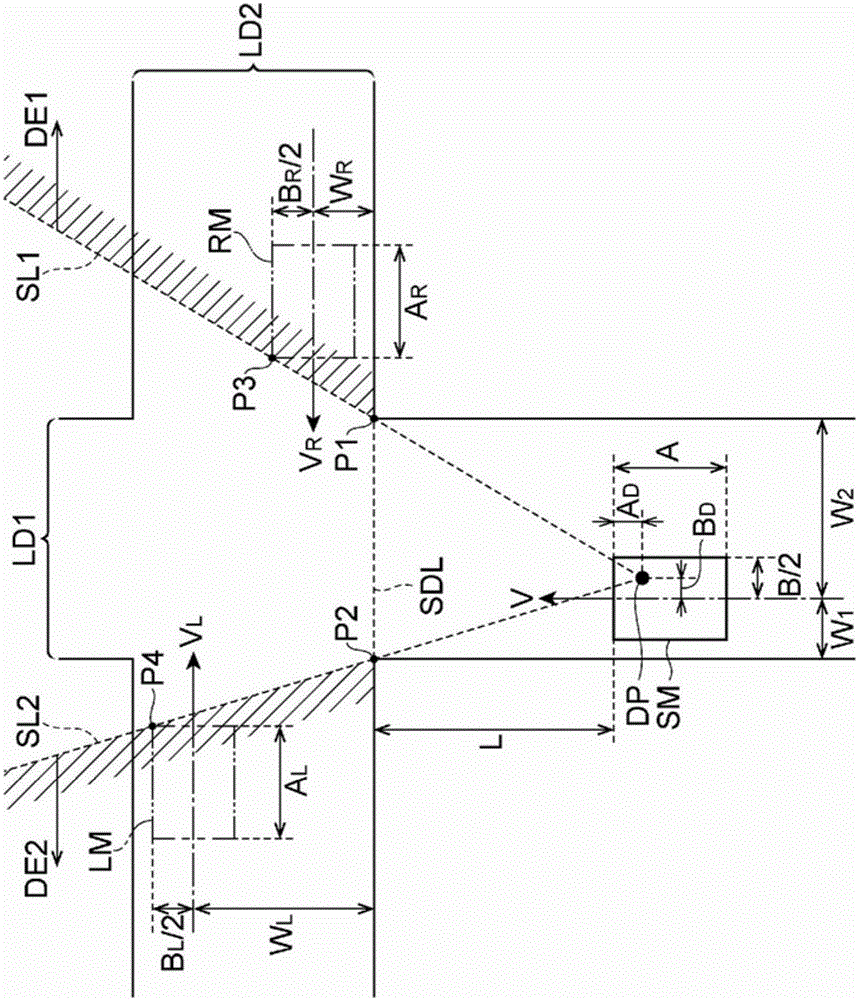
[0028] figure 1 It is a block configuration diagram of the driving assistance device according to the embodiment. figure 2 It is a figure which shows an example of the state immediately before host vehicle SM enters an intersection. exist figure 2 In the shown intersections, the lane on which the host vehicle SM travels is indicated by LD1 , and the lane crossing the lane LD1 is indicated by LD2 . exist figure 2 , it is assumed that the lane LD1 on which the host vehicle SM travels is the priority lane. It is assumed that structures such as walls, fences, and buildings are provided at least on both sides of the traffic lane LD1. At such intersections as figure 1 As shown, a dead spot DE1 is formed on the right side of the host vehicle SM, and a dead spot DE2 is formed on the left side of the host vehicle SM. The field of view of the driver DP in the ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More