

Improved VFH algorithm-based positioning and obstacle avoidance method and robot
A robot and algorithm technology, applied in two-dimensional position/channel control and other directions, can solve problems such as drift error time accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
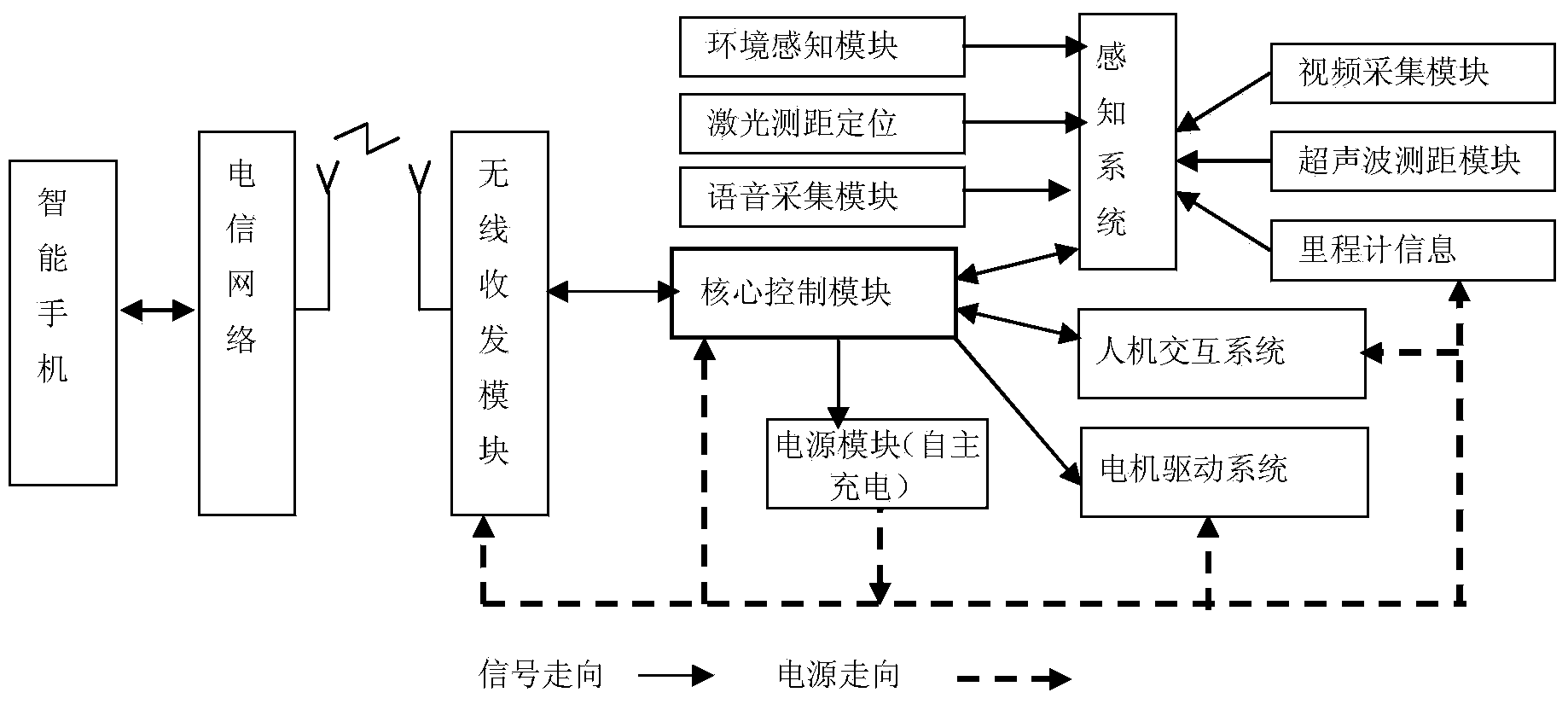
[0021] Such as figure 1 As shown, the present invention mainly relates to an intelligent robot in a home environment, which is an autonomous mobile robot with environmental awareness, simultaneous positioning and map creation, and obstacle avoidance path planning. It includes a perception system, a core control module, a human-computer interaction system, and a motor drive system. The perception system accepts audio and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More