

Method for designing flexible mechanical arm disturbance observer based on partial differential equation
A technology of flexible manipulators and disturbance observers, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., and can solve the problems of flexible manipulator drive motor interference and system performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
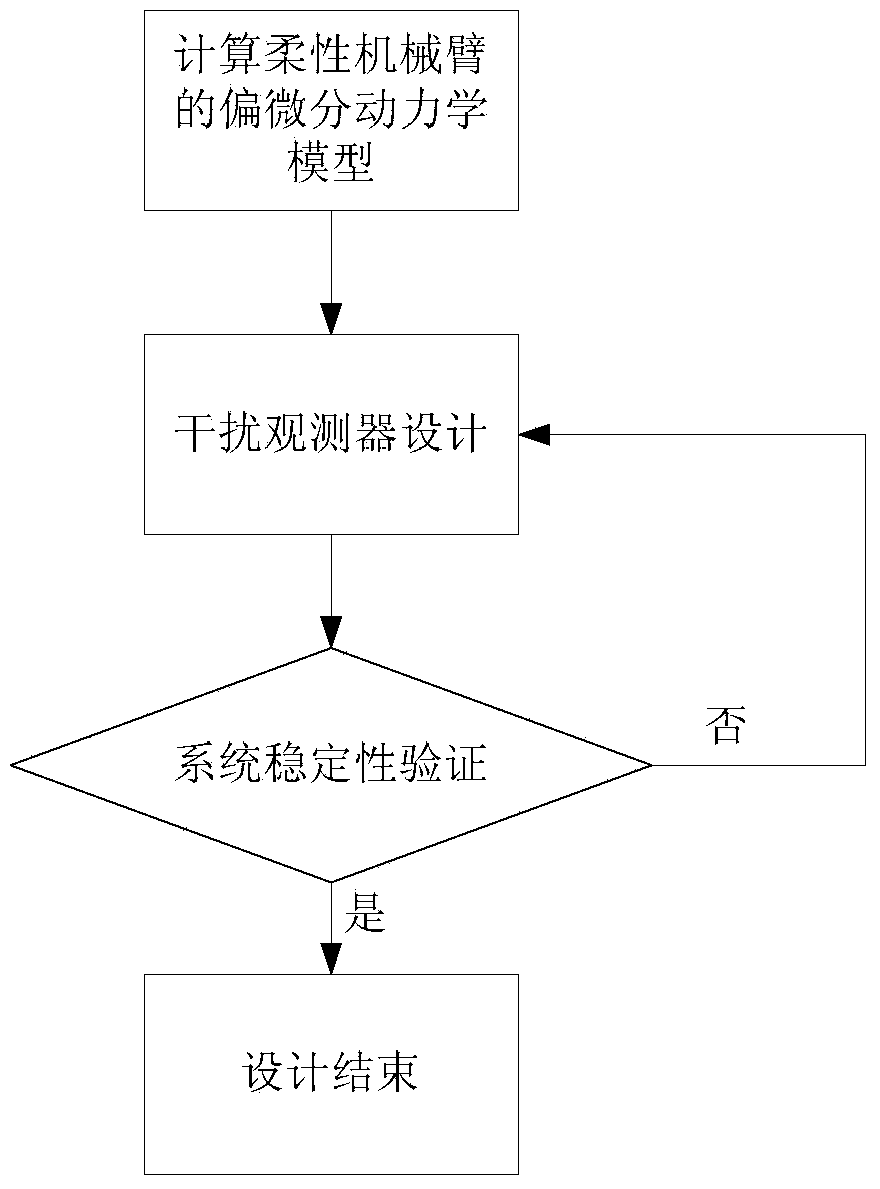
[0084] See figure 1 , a method for designing a disturbance observer for a flexible manipulator based on partial differential equations of the present invention, the specific steps of the method are as follows:
[0085] Step 1: Dynamic modeling of the flexible manipulator
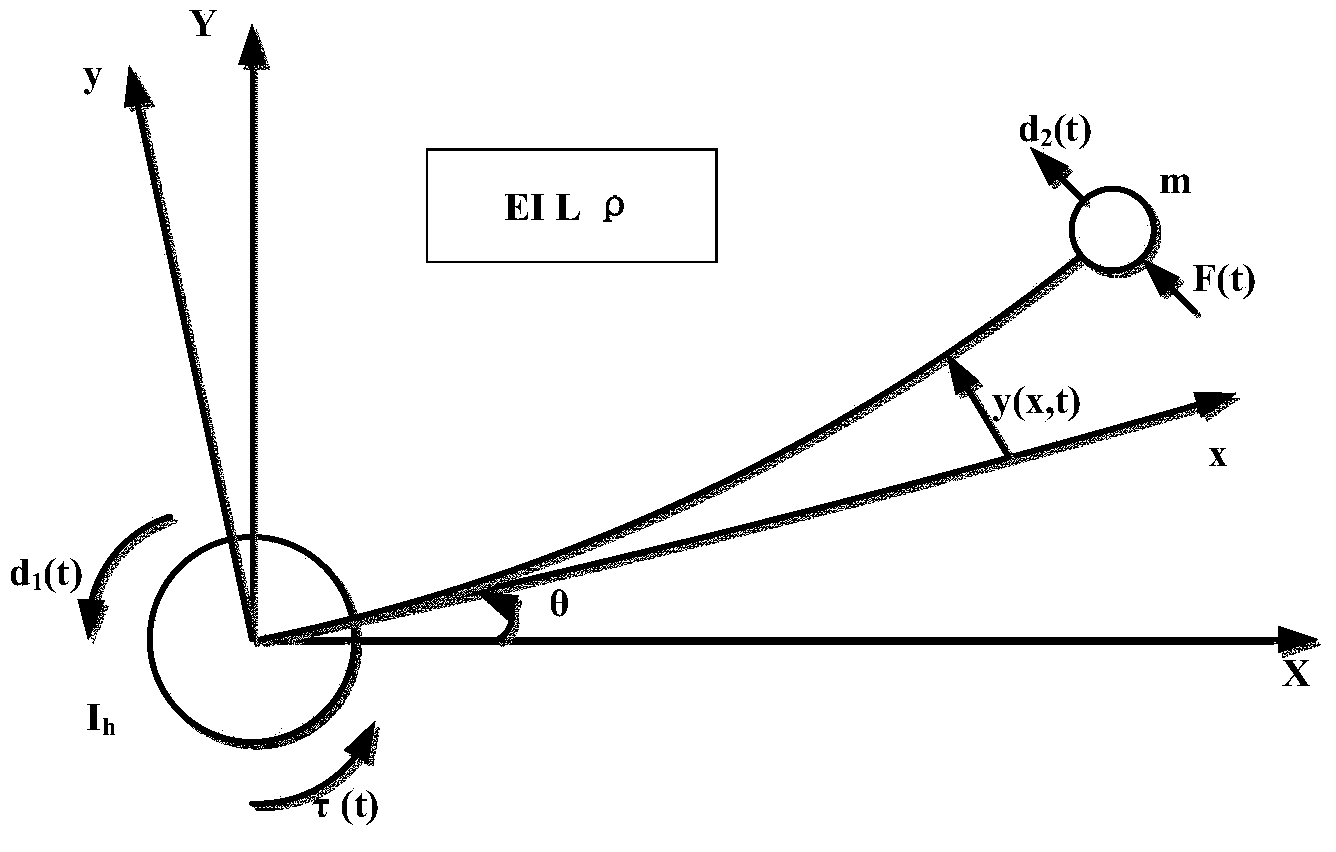
[0086] A model of a flexible manipulator such as figure 2 As shown, its kinetic modeling adopts the method of Hamilton's principle. It should be explained in advance that the state variables θ(t) and y(x,t) used in modeling represent the joint angle of the manipulator at time t and the elastic deformation at point x, respectively. For convenience, θ(t) and y(x,t) are abbreviated as θ and y(x) respectively in the following analysis.
[0087] The natural boundary conditions of the flexible manipulator are
[0088] y(0)=y x (0) = 0 (1)
[0089] Among them, y x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More