Binocular vision-based human body posture and action research method
A technology for human posture and movement research, applied in image data processing, instruments, computing, etc., can solve the problems of complex optoelectronic equipment, high cost, and high light requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0090] The first embodiment of the present invention is used to judge whether the subject has squatted and translated in the left and right directions and the front and rear directions, and is realized by the following steps:
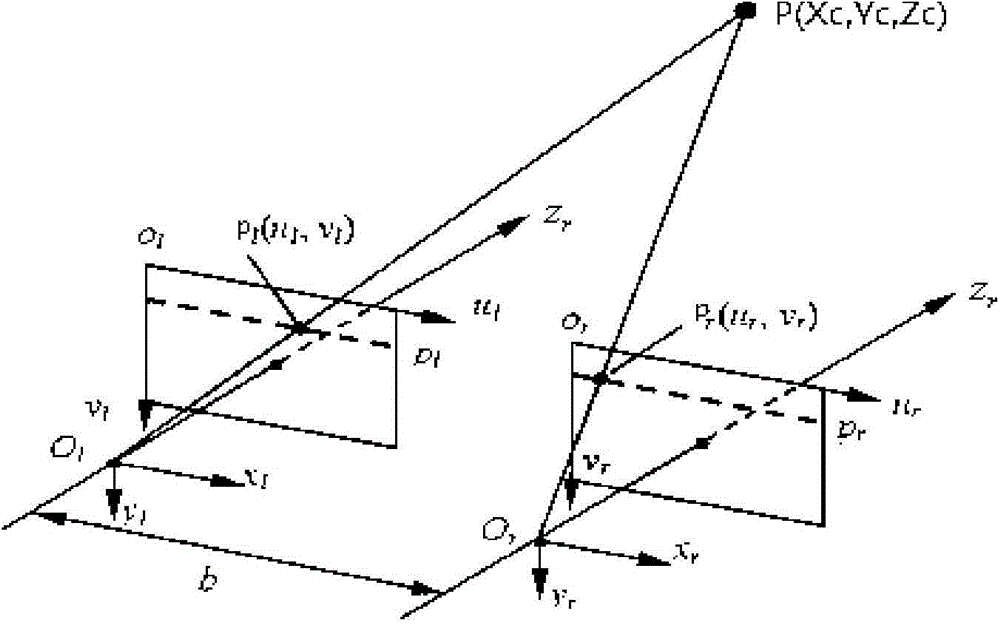
[0091] S1: Place the left camera and the right camera on the same horizontal line parallel to the ground, where the two cameras are of the same model, the distance between the two cameras is a set value, and both cameras can capture a complete upper body of human body,
[0092] Among them, the two cameras are both MV-VS078FC cameras, and the two cameras are respectively fixed at the same level by tripods;
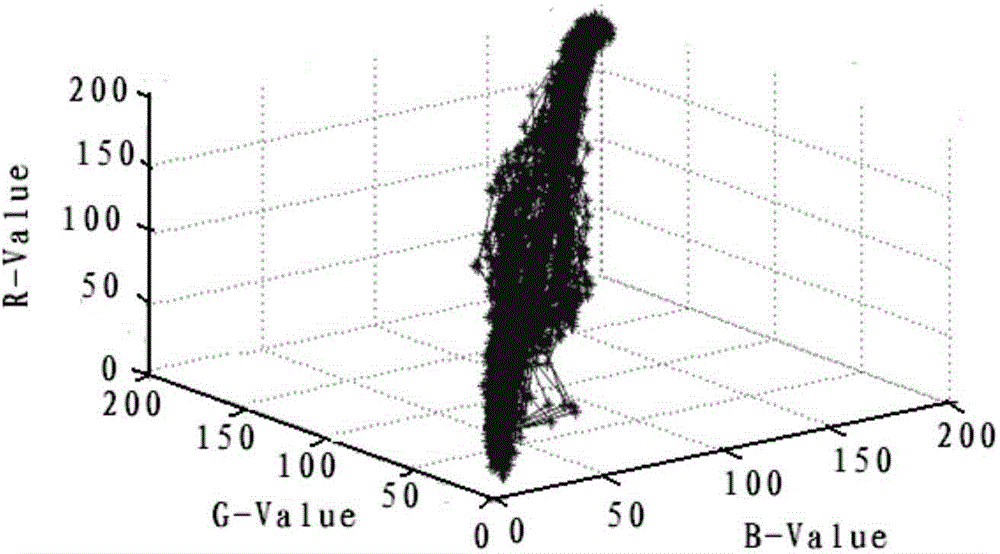
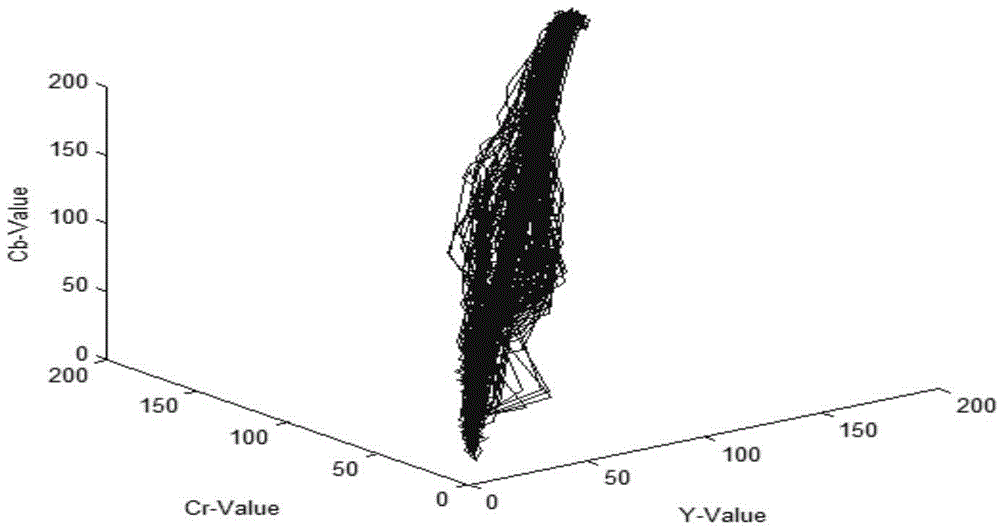
[0093] S2: For the dual-target calibration of the left camera and the right camera, first prepare a rectangular calibration board with multiple circular feature points, where the multiple circular feature points are arranged in an array of multiple rows and columns, located in the same row The circle centers of the circular feature points are on the...
no. 2 example
[0144] The second embodiment of the present invention is used to judge the arm posture of the subject. Specifically, it can determine the angle at which the subject's arms are opened and the degree to which the arms are bent respectively. Steps S1 to S29 are the same as those in the first embodiment , so no more details, assuming that the multiple skin color areas in S12 also include the left and right hands of the subject, and the centroid points of the left and right hands of the subject are not discarded in S30, the arm posture of the subject is judged by the following steps:
[0145] The subject keeps his arms straight, so that the arms are in the same plane and the plane where the arms are located is at an angle of 90 degrees to the vertical plane, and the face, left hand and right hand of the subject are calculated respectively using the above steps S10-S28 The coordinates of the centroid point in the world coordinate system, and then calculate the distance between the le...
no. 3 example
[0153] The third embodiment of the present invention is used to judge whether the subject has moved rapidly within a certain period of time. Steps S1 to S30 are the same as those of the first embodiment, so no further details are given. The following steps are used to determine whether the subject has moved rapidly within a period of time. Has rapid movement occurred:
[0154] Set a speed threshold V T ;
[0155] Calculate the movement distance d of the centroid point of the face within the time t0~t1,
[0156] d = | P t 0 P t 1 → | = ( x ′ - x 0 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More