A research method of human posture and action based on binocular vision
A technology for human body posture and motion research, applied in image data processing, instruments, calculations, etc., can solve problems such as high cost, high light requirements, complex optoelectronic equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0089] The first embodiment of the present invention is used to determine whether the subject squatting and translation in the left-right direction and the front-rear direction is realized by the following steps:
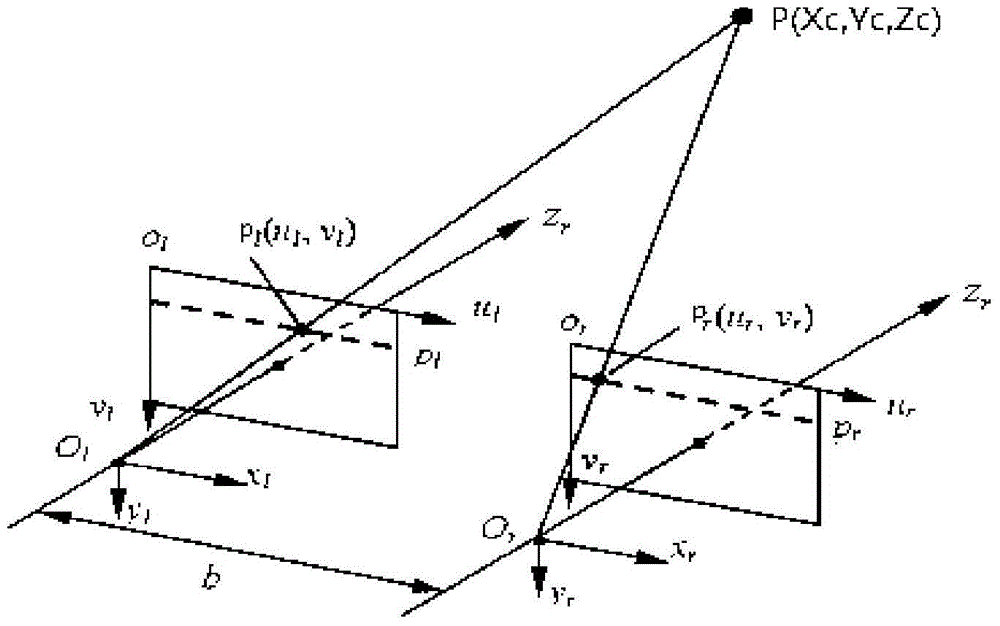
[0090] S1: Place the left camera and the right camera on the same horizontal line parallel to the ground, where the two cameras are of the same model, the distance between the two cameras is a set value, and both cameras can shoot a complete upper body of the human body,
[0091] Among them, the two cameras are MV-VS078FC cameras, and the two cameras are fixed at the same level by tripods;
[0092] S2: Perform dual-target calibration on the left camera and the right camera. First, prepare a rectangular calibration plate with multiple circular feature points, wherein the multiple circular feature points are arranged in an array of multiple rows and columns, which are located in the same row. The centers of the circular feature points are on the same line, and the ce...
no. 2 example
[0142] The second embodiment of the present invention is used to judge the arm posture of the collected person. Specifically, it can judge the open angle of the collected person's arms and the degree of bending of the arms respectively. Steps S1 to S29 are the same as the first embodiment. , so do not repeat, assuming that the multiple skin color regions in S12 also include the left hand and right hand of the person being collected, and the centroid points of the left hand and right hand of the person being collected are not discarded in S30, and the arm posture of the person being collected is judged by the following steps:
[0143] The subject keeps his arms straight, so that the arms are in the same plane and the plane where the arms are located forms an included angle of 90 degrees with the vertical plane. Use the above steps S10 to S28 to calculate the subject's face, left hand and right hand respectively. The coordinates of the centroid point in the world coordinate syste...
no. 3 example
[0151] The third embodiment of the present invention is used for judging whether the collected person has moved rapidly within a period of time. The steps S1 to S30 are the same as the first embodiment, so they will not be repeated. The following steps are used to judge whether the collected person has moved within a period of time. Did fast movement occur:
[0152] Set a speed threshold V T ;
[0153] Calculate the moving distance d of the centroid point of the face in the time t0 ~ t1,
[0154]
[0155] Since the sudden change of human motion state is often completed in a very short time, the time interval between t0 and t1 should not be too large. Determine the number of image frames that differ between t0 and t1), that is, assuming that the frame rates of the video captured by the left camera and the right camera are both f, then t1-t0=5 / f;
[0156] Calculate the average velocity of the face centroid in the time t0 ~ t1:
[0157] v=d / (t1-t0);
[0158] when v>V T ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More