

Multi-translational-degree-of-freedom parallelogram complex kinematic pair
A parallelogram and complex motion technology, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of simple function, compact mechanism, and short force transmission route
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
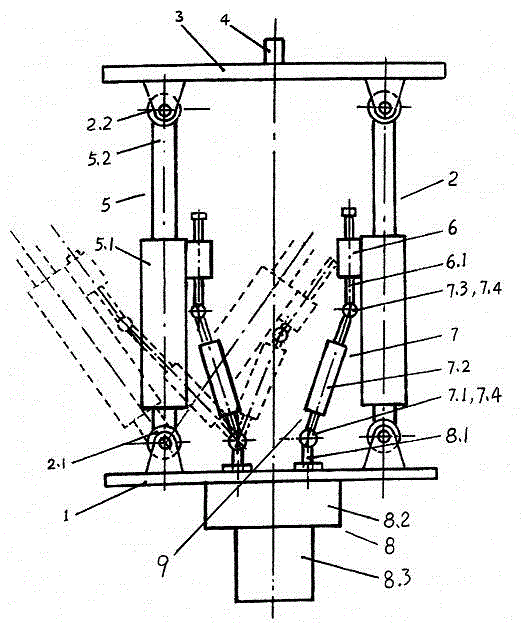
[0117] Example 1 ( figure 1 ) is an example of synchronous motion of moving pairs realized by mechanical transmission. It is a novel parallelogram complex kinematic pair [2RPR] composed of 2 RPR side chains 2. It consists of a frame 1, an output member 3, two RPR side chains 2 and a set of synchronous transmissions 9. The frame 1 and the output member 3 are parallel to each other, the axes of the side chains 2 are parallel to each other, and the axes of the respective rotating pairs of the rotating kinematic pairs are correspondingly parallel. The side chain 2 is composed of a frame rotation kinematic pair (rotation pair) 2.1 at the lower end, a moving pair 5, and an output component rotation kinematic pair 2.2; wherein the moving pair 5 is two electric cylinders. The motor 8.3 of the electric cylinder is separated from the mobile auxiliary cylinder body 5.1. The synchronous transmission device 9 includes a cylinder block connection transmission box 6 , a flexible shaft 7 ...
Embodiment 2
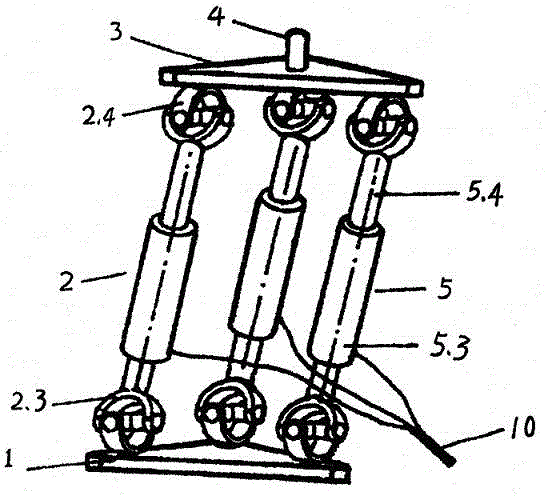
[0120] Example 2 ( figure 2 ) is a novel parallelogram complex kinematic pair [3UPU] composed of 3 UPU side chains 2, which has 3 degrees of freedom of movement. It includes a frame 1, a side chain 2, an output member 3 and a synchronous transmission 9. The side chain 2 is composed of the frame rotation type kinematic pair (Hooke hinge) 2.3 at the lower end, the moving pair 5, and the output member rotation type kinematic pair (Hooke hinge) 2.4 at the upper end point. The figure formed by the three fulcrums of the frame 1 is an equilateral triangle, and the figure formed by the three fulcrums of the output member 3 is also an equilateral triangle, which is congruent with the equilateral triangle of the output member 3 . Frame rotation kinematic pair 2.3 is a Hooke hinge, output member rotation kinematic pair 2.4 is a Hooke hinge, and the moving pair 5 is three identical linear servo electric cylinders: including the moving pair cylinder body 5.3 and the moving pair servo cylin...
Embodiment 3
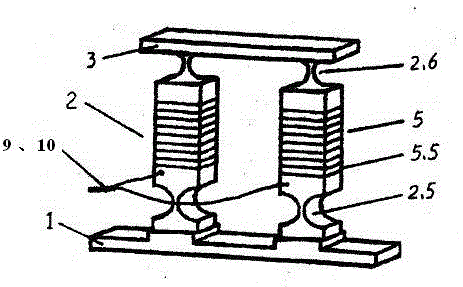
[0122] Example 3 ( image 3 ) is a new type of complex kinematic pair [2RPS] composed of two RPS side chains 2, which has two degrees of freedom for movement and one degree of freedom for rotation. It includes a frame 1, a side chain 2, an output member 3 and a synchronous transmission 9. The side chain 2 includes a frame rotation type kinematic pair (rotation pair) 2.5, a moving pair 5, and an output component rotation type kinematic pair (spherical joint) 2.6. The frame rotation kinematic pair 2.5 on frame 1 is a flexible (compliant) rotation pair, the output member rotation kinematic pair 2.6 of the output member 3 is a flexible ball pair (or flexible Hooke hinge), and the moving pair 5 is two identical A miniature mobile pair composed of the mobile auxiliary cylinder body 5.5 (laminated piezoelectric ceramic device). Both the frame 1 and the output member 3 are rectilinear. The synchronous transmission device 9 includes a computer system, a sensor, a signal output syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More