

Intelligent parking system with man-vehicle interaction function
A technology of intelligent parking and human-vehicle interaction, applied in the field of human-vehicle interactive intelligent parking system, can solve problems such as insufficient processing speed, no consideration of the second order derivative of the path, and unsatisfied vehicle constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0077] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0078] The invention provides a human-vehicle interactive intelligent parking system, figure 1 It is a schematic diagram of the system, which includes an environment detection module, a path planning module and a motion control module;
[0079] The path planning module is divided into five stages, which are: judgment stage, initialization stage, free planning stage, final planning stage and arbitration stage; the planning sequence of the path planning module is opposite to the actual parking sequence of the vehicles, and the path planning module plans is the path from the vehicle end position to the vehicle start position, and the actual parking sequence of the vehicle is from the vehicle start position to the vehicle end position.
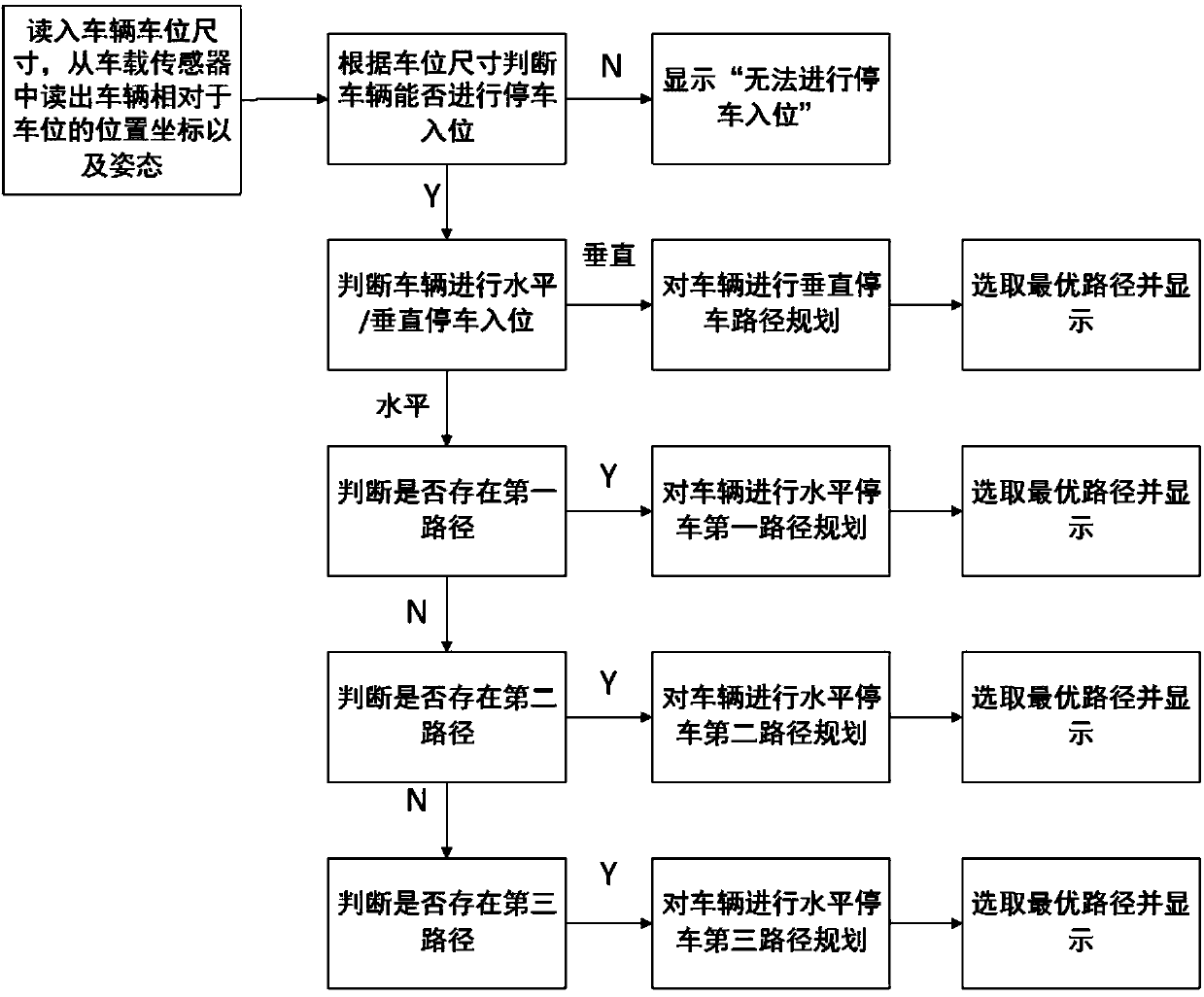
[0080] The flow chart of the path planning module is as follows: image 3 As shown in , after the user gives the parking c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More