

Robot team formation control method based on position estimation
A control method and robot technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problem that the position information cannot be obtained accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0127] In order to verify the effectiveness of the multi-robot system-based formation control method based on position estimation, the present invention verifies the validity of the verification method through MATLAB simulation, and conducts experiments to test its feasibility on a multi-robot mobile experimental platform independently built by the laboratory.
[0128] 1. First-order model simulation
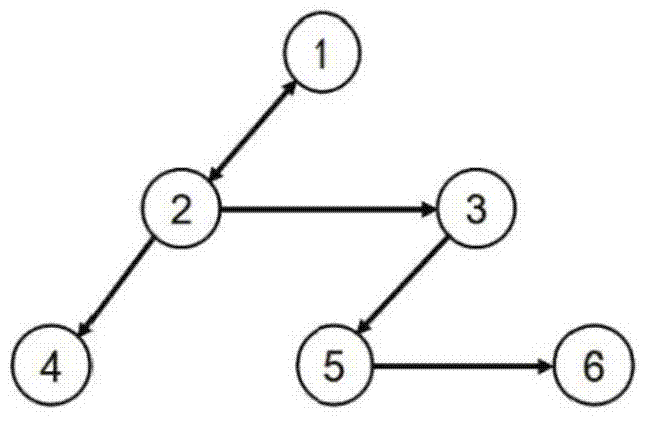
[0129] The interactive topological diagram composed of the robots used is as follows: image 3 As shown, the initial positions used in the simulation are p(1)=(-3,-0.5), p(2)=(-0.5,0.2), p(3)=(0,-0.4), p( 4)=(-0.4,-0.3), p(5)=(0.3,0.4), p(6)=(0,0.45). Figure 4 and Figure 5 Results are shown for the multi-robot system of the single integrator model under the action of estimation law (2) and control law (5).
[0130] After adding the collision avoidance item, the trajectory of the robot and the estimated error control error results are as follows: Figure 6 and Figure 7 show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More