

Multi-robot Circular Formation Control Method Based on Distributed Center and Radius Estimation
A multi-robot and control method technology, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control, etc., to achieve the effect of improving the robustness of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
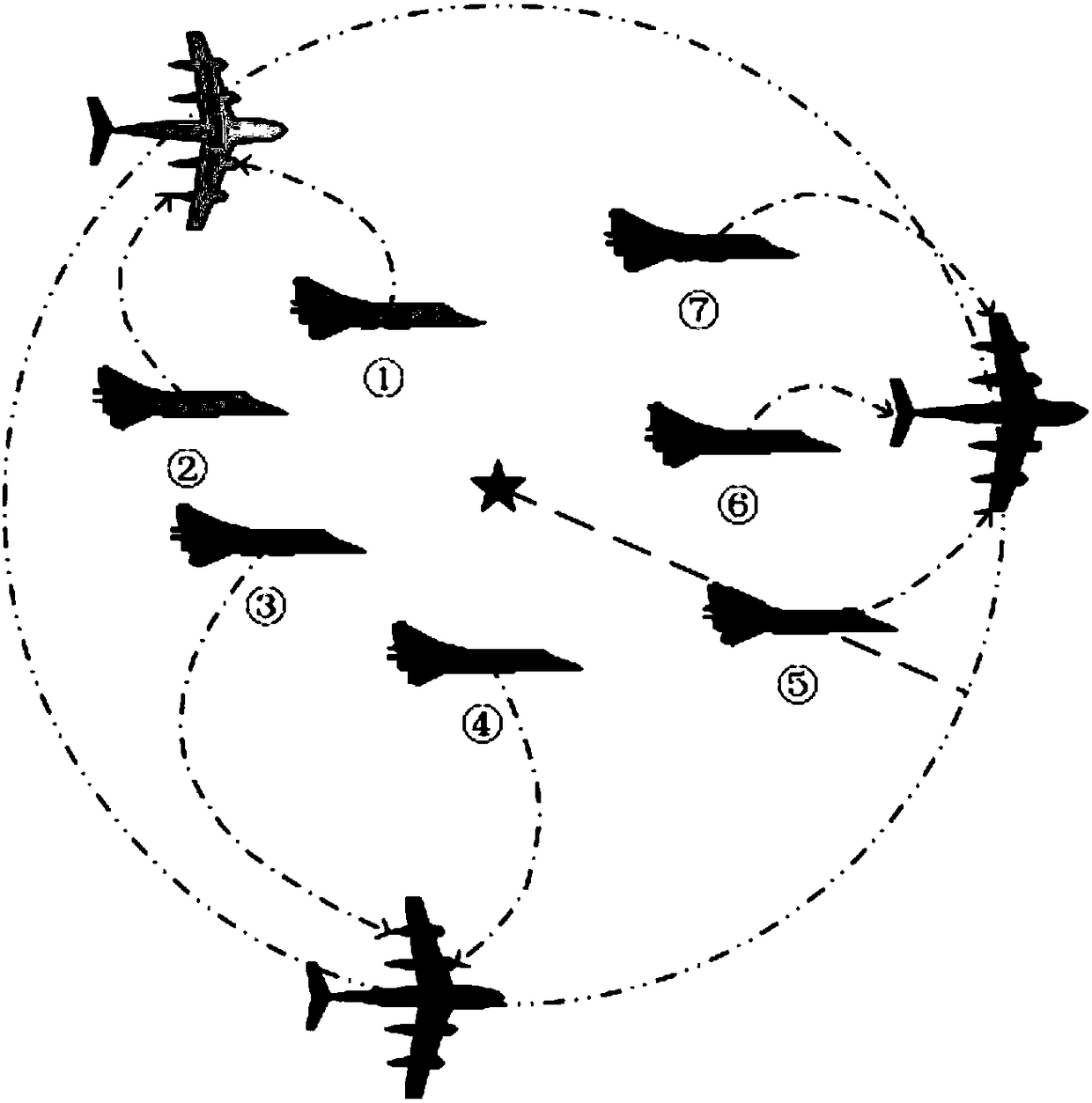
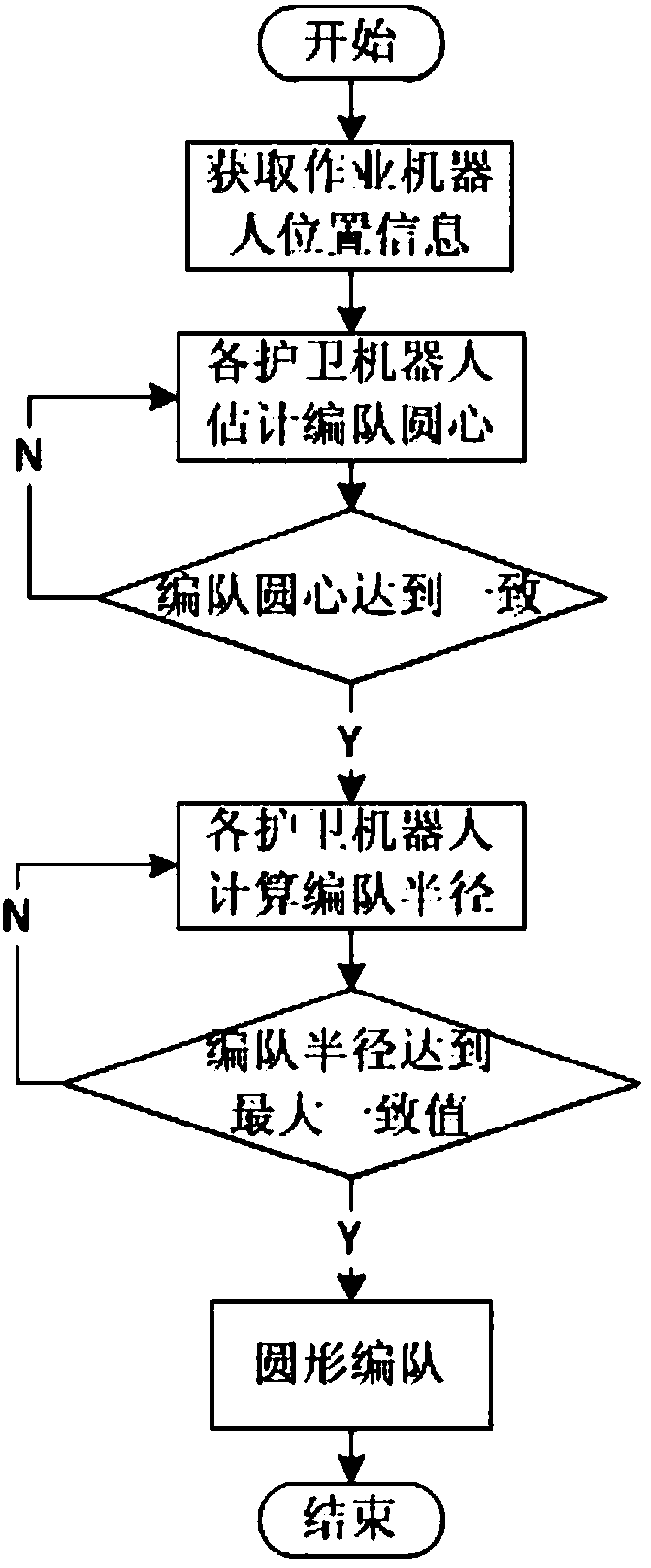
[0022] A robot circular formation control method based on distributed circle center and circle radius estimation, the specific process is:
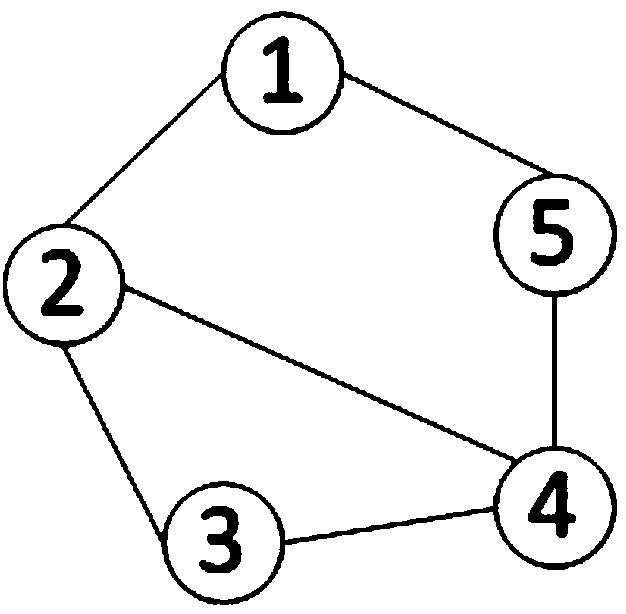
[0023] First, in order to reduce the defects caused by the traditional centralized algorithm, a distributed position estimator is introduced to obtain the center position information of the formation, where the position of the center of the formation is related to the positions of all the working robots to be guarded. Each guard robot can know the real-time position information of the work robot it needs to guard, and each guard robot communicates with its adjacent guard robot to obtain the position information of the work robot cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More