

Attitude Nonlinear Adaptive Control Method for Small Unmanned Helicopter
An unmanned helicopter and adaptive control technology, applied in attitude control and other directions, can solve problems such as the inability to guarantee the independence of the estimator and the inability to adjust the convergence rate of parameter estimation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The technical scheme adopted in the present invention is: in the situation that the small unmanned helicopter has parameter uncertainty, the immersion-invariant set method is used in the attitude system control of the small unmanned helicopter, comprising the following steps:
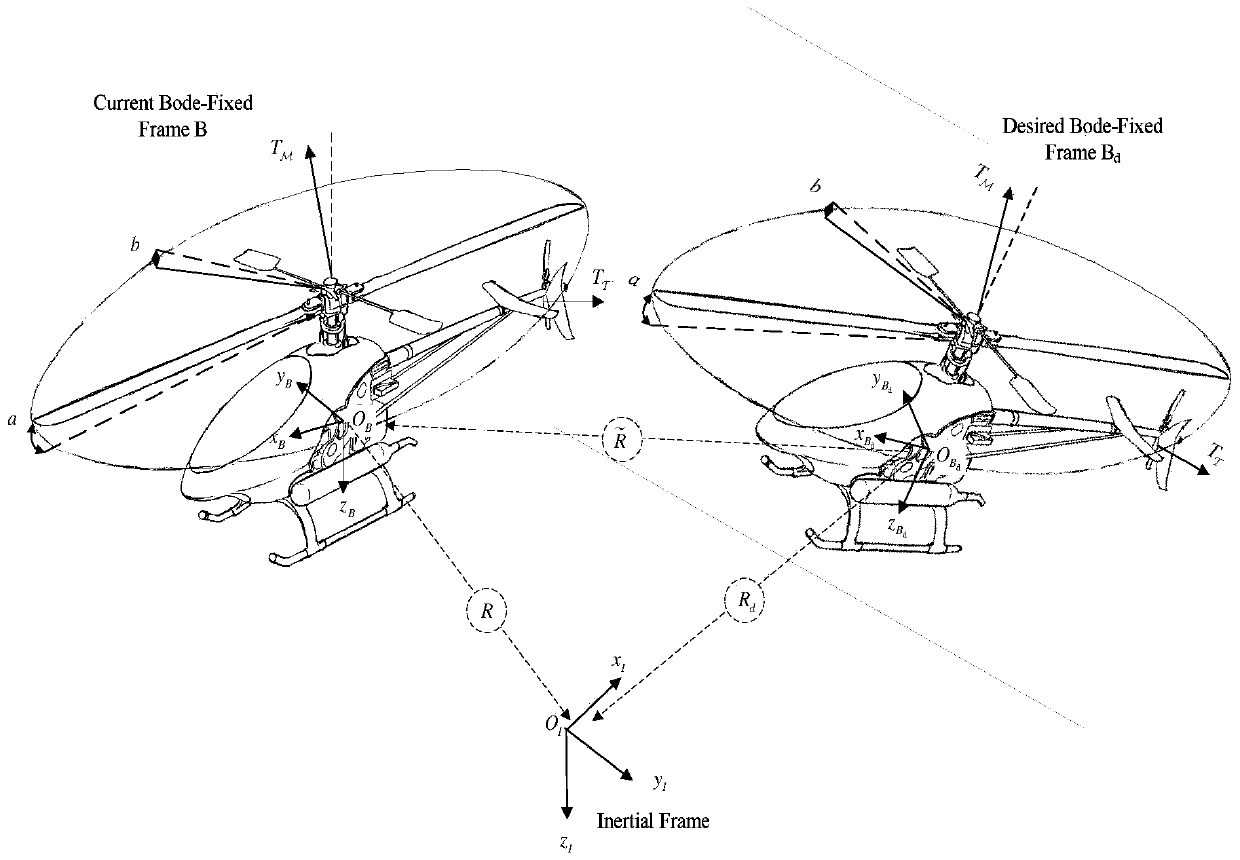
[0061] 1) Determine the coordinate system definition of the small unmanned helicopter;
[0062] The definition of the small unmanned helicopter coordinate system mainly involves three coordinate systems, the inertial coordinate system {I}={O I ,x I ,y I ,z I}, current body coordinates {B}={O B ,x B ,y B ,z B} and target body coordinate system where O i (i=I,B,B d ) represents the origin of the coordinate system, x i ,y i ,z i (i=I,B,B d ) respectively correspond to the unit vectors in the directions of the three principal axes of the coordinate system, and the definition of each coordinate system follows the right-hand rule. The rotation matrix from the current body coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More