

Tightrope walking robot structure with double flywheels
A technology of tightrope walking and robot, applied in the field of double flywheel tightrope walking robot structure, can solve the problems of flexible steel wire deformation, increase the difficulty and uncertainty of control, increase the stability of robots and tightrope acrobats, etc., and achieve the effect of reducing control difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
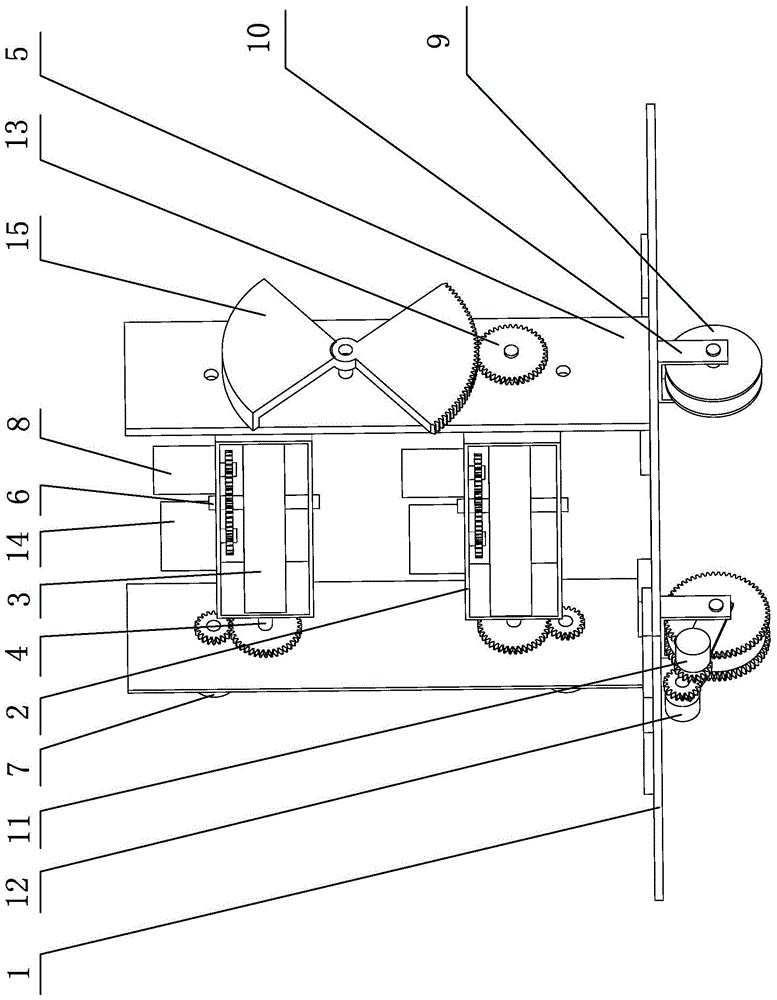
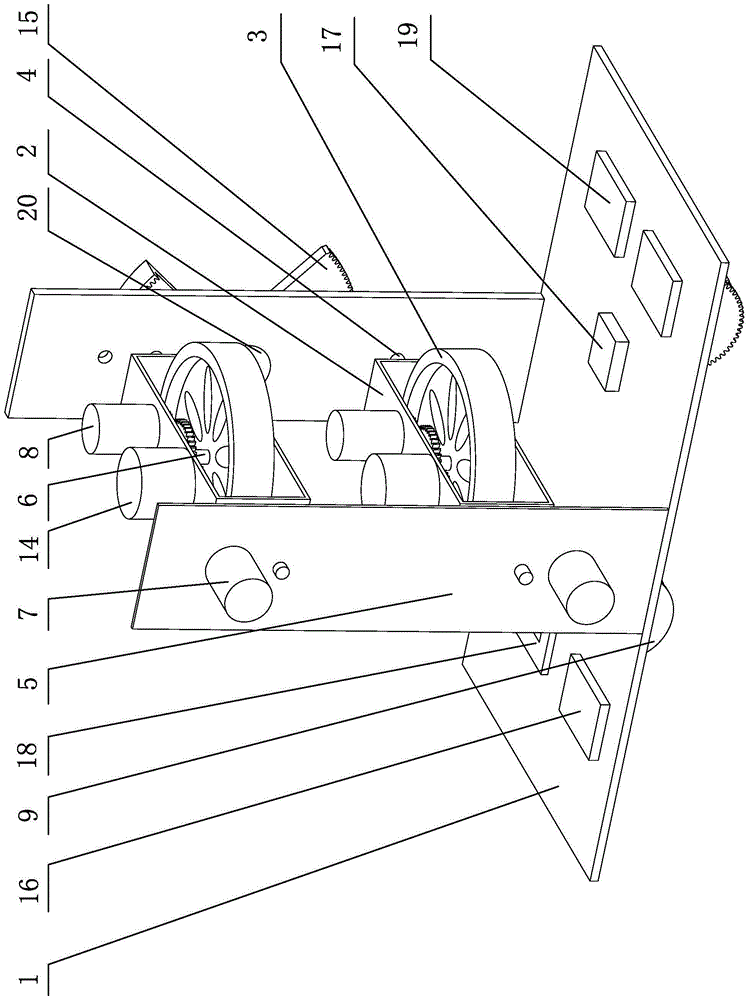
[0018] The technical solution of the double-flywheel tightrope walking robot structure of the present invention includes a balance device, a walking device and a control device based on the base plate 1 .
[0019] The base plate 1 is a flat plate, and a support frame 5 is arranged on the base plate 1, and the support frame 5 is composed of left and right side plates, such as figure 1 , figure 2 shown.
[0020] The balance device includes upper and lower balance frames 2 and upper and lower balance flywheels 3, and the upper and lower balance frames 2 are placed horizontally (the length direction of the balance frame 2 is left and right, and the inner hollow part of the balance frame 2 is the front , rear direction) between the left and right side plates of the support frame 5, each balance frame 2 is installed on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More