

Control system and method of self-following balancing trolley
A technology for balancing the trolley and the control system, which is applied in the control/adjustment system, the control of finding targets, and the two-dimensional position/channel control. performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
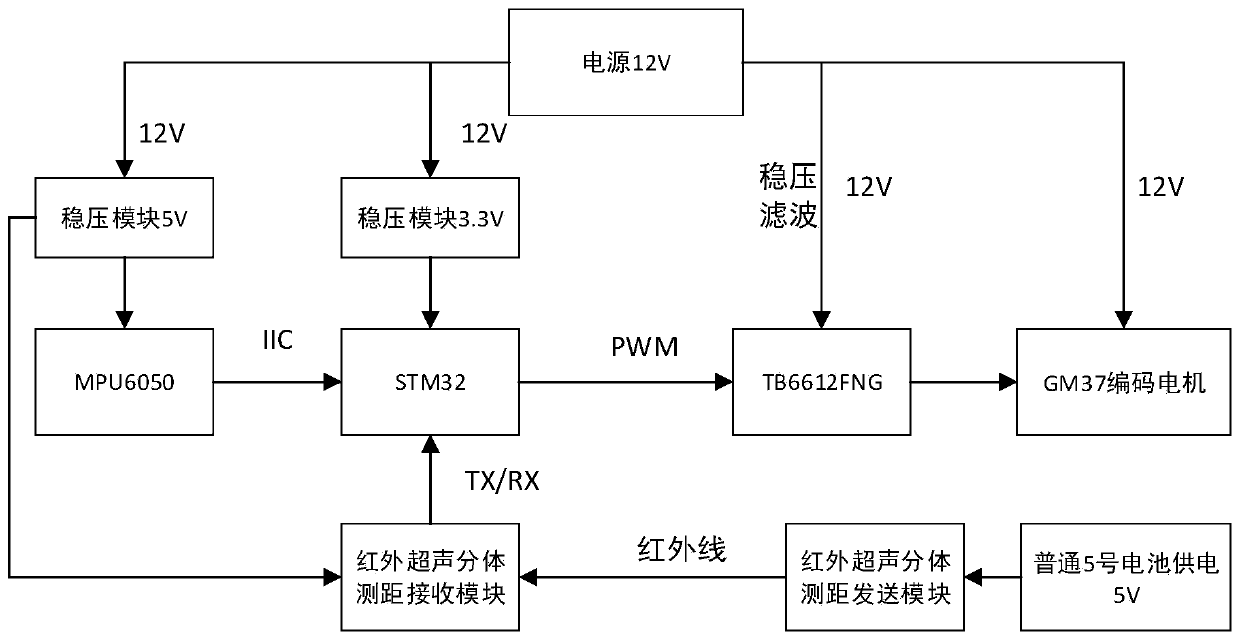
[0027] A control system for a self-following balancing trolley, comprising a master control device and an automatic follower device, and information interaction between the master control device and the automatic follower device is realized through an infrared ultrasonic ranging receiving and sending device;
[0028] The main control device adopts the STM32F103RBT6 main control board, the STM32F103RBT6 main control board is connected with the car attitude acquisition device, the car attitude acquisition device includes the sensor module, the STM32F103RBT6 main control board is connected with the infrared ultrasonic split distance measurement receiving device, the car attitude acquisition device, and the speed measuring device , The motor drive device is connected, and the STM32F103RBT6 main control board is connected to the host computer throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More