

Proportion coefficient analysis-based momentum wheel fault diagnosis method
A proportional coefficient and fault diagnosis technology, which is applied in the direction of measuring devices, mechanical parts testing, machine/structural parts testing, etc., can solve the problems that the momentum wheel fault detection method cannot detect faults, and cannot realize early warning of small faults, etc., to achieve Improve the accuracy of fault diagnosis, avoid false alarms, and achieve early warning effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
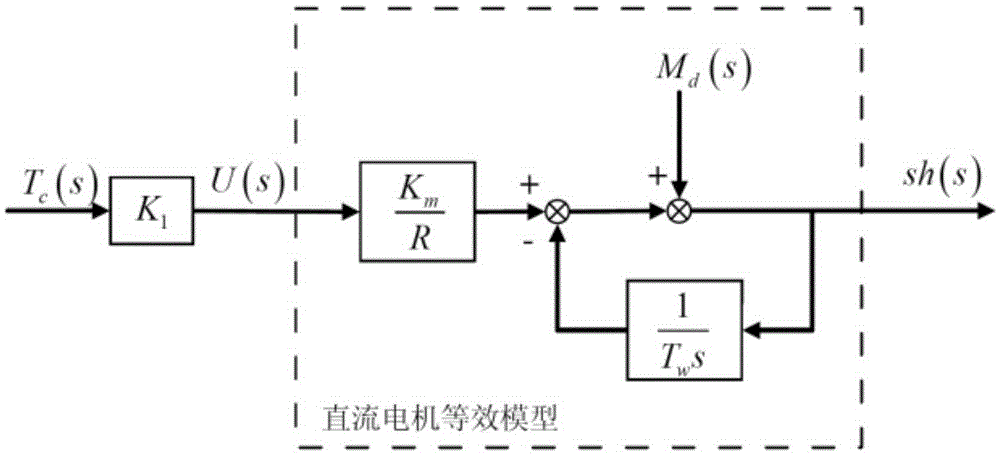
[0022] Specific implementation mode one: combine figure 2 To illustrate this embodiment, a momentum wheel fault diagnosis method based on proportional coefficient analysis in this embodiment is specifically prepared according to the following steps:
[0023] The momentum wheel usually adopts DC brushless motor, and its time domain equation is:
[0024] U ( t ) = E ( t ) + R i ( t ) + L d i ( t ) d t
[0025] E(t)=K e Ω(t)(1)
[0026] M ( t ) = K m i ( ...
specific Embodiment approach 2
[0054] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in the step 4, the calculation of the mean value and standard deviation is carried out to the proportional coefficient of the N section and recorded as and σ, set the anomaly threshold as The specific process is:
[0055] k ‾ = 1 N Σ j = 1 N k ( j )
[0056] σ = 1 N Σ j = 1 N ( k ( j ) - ...
Embodiment 1
[0060] A momentum wheel fault diagnosis method based on proportional coefficient analysis, specifically prepared according to the following steps:
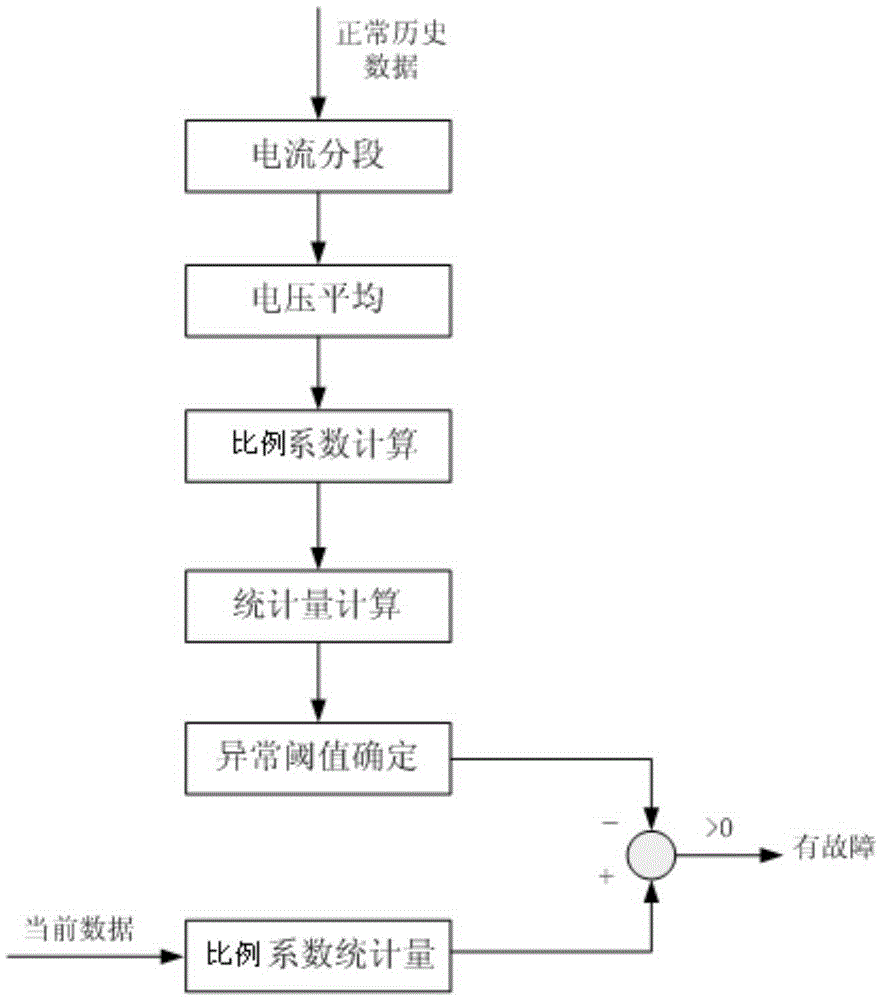
[0061] Step 1. Based on the telemetry data of the motor current, if the motor current value at the nth telemetry moment is the same as the motor current value at the n+1st telemetry moment, it will not be recorded as a segment time. If the nth telemetry moment The motor current value of the motor current value is different from the motor current value of the n+1th telemetry moment, then record the nth telemetry moment as the segmentation time, and obtain the segmentation time of all telemetry data;
[0062] Two adjacent subsections in any order determine a motor current segment at any time, and mark it as j in sequence, assuming that the total number of segments of the motor current is N;
[0063] Step 2. Divide the telemetry voltage data according to the obtained motor current of each segment, and add and average the correspondin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More