

Dummy for grappling training and arm structure thereof
A technology of arm structure and dummy, applied in the direction of sports accessories, etc., can solve the problems of inapplicable grasping exercises, etc., achieve the effect of fast and effective grasping, overcome hidden safety hazards, and improve the level of grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
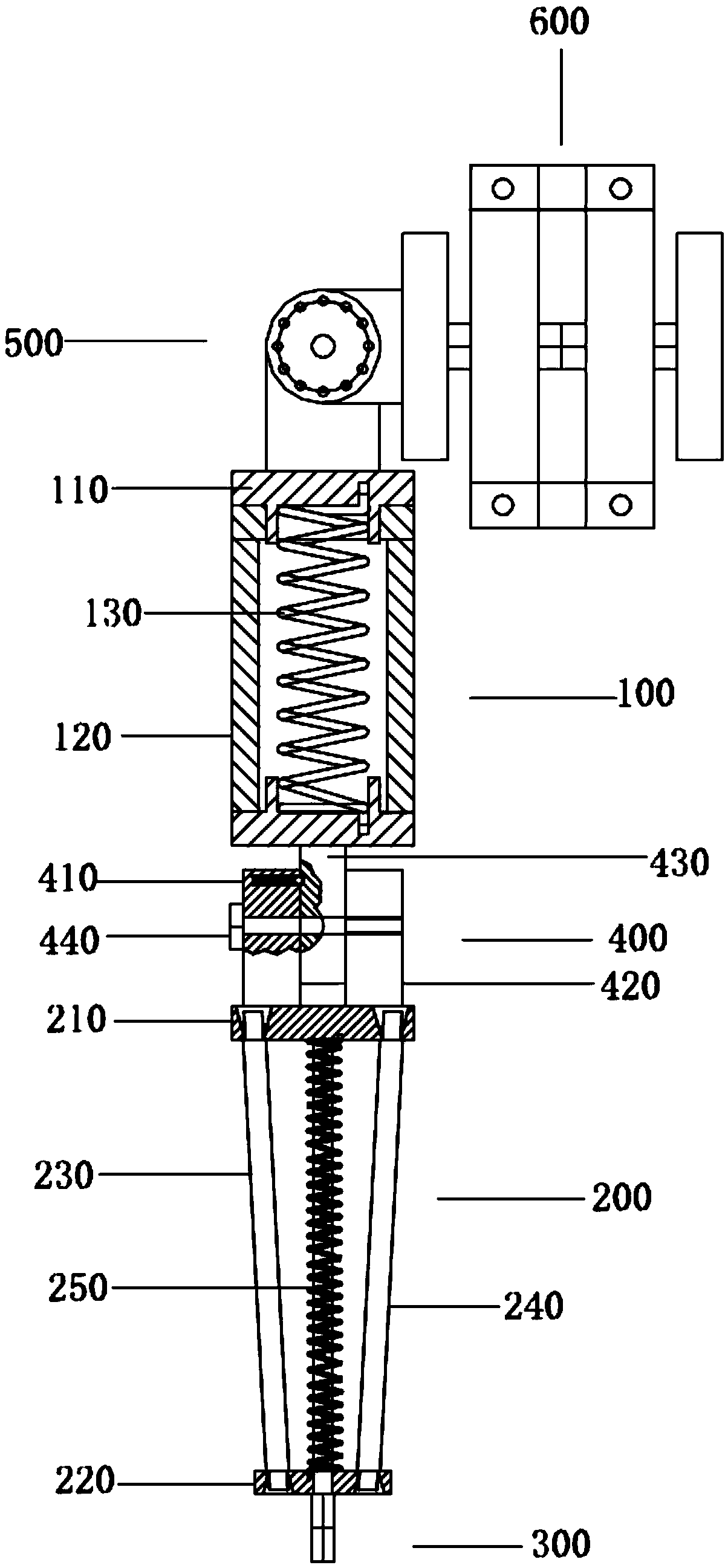
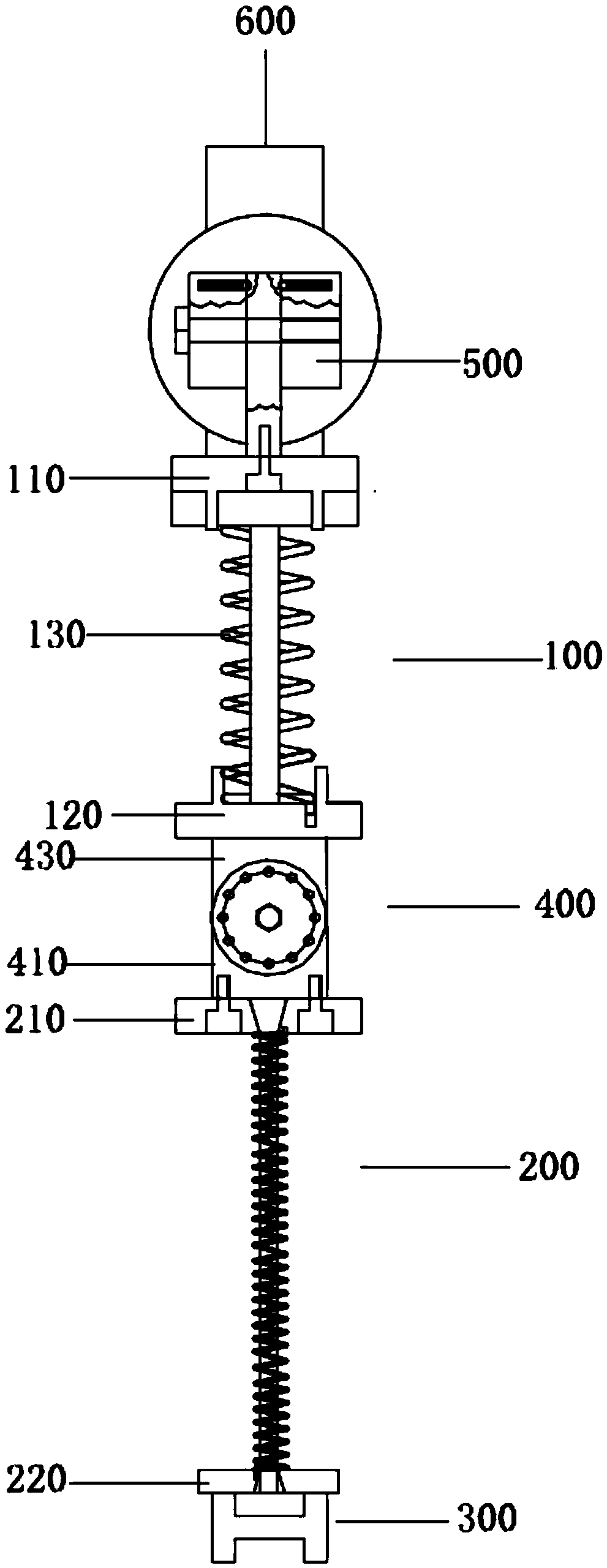
[0058] Such as figure 1 and figure 2 As shown, this embodiment discloses a dummy arm structure, which includes an upper arm mechanism 100, a lower arm mechanism 200 and a palm mechanism 300, the upper arm mechanism 100 and the lower arm mechanism 200 are movably connected, and the palm mechanism 300 and the lower arm mechanism 200 are movable. connect.
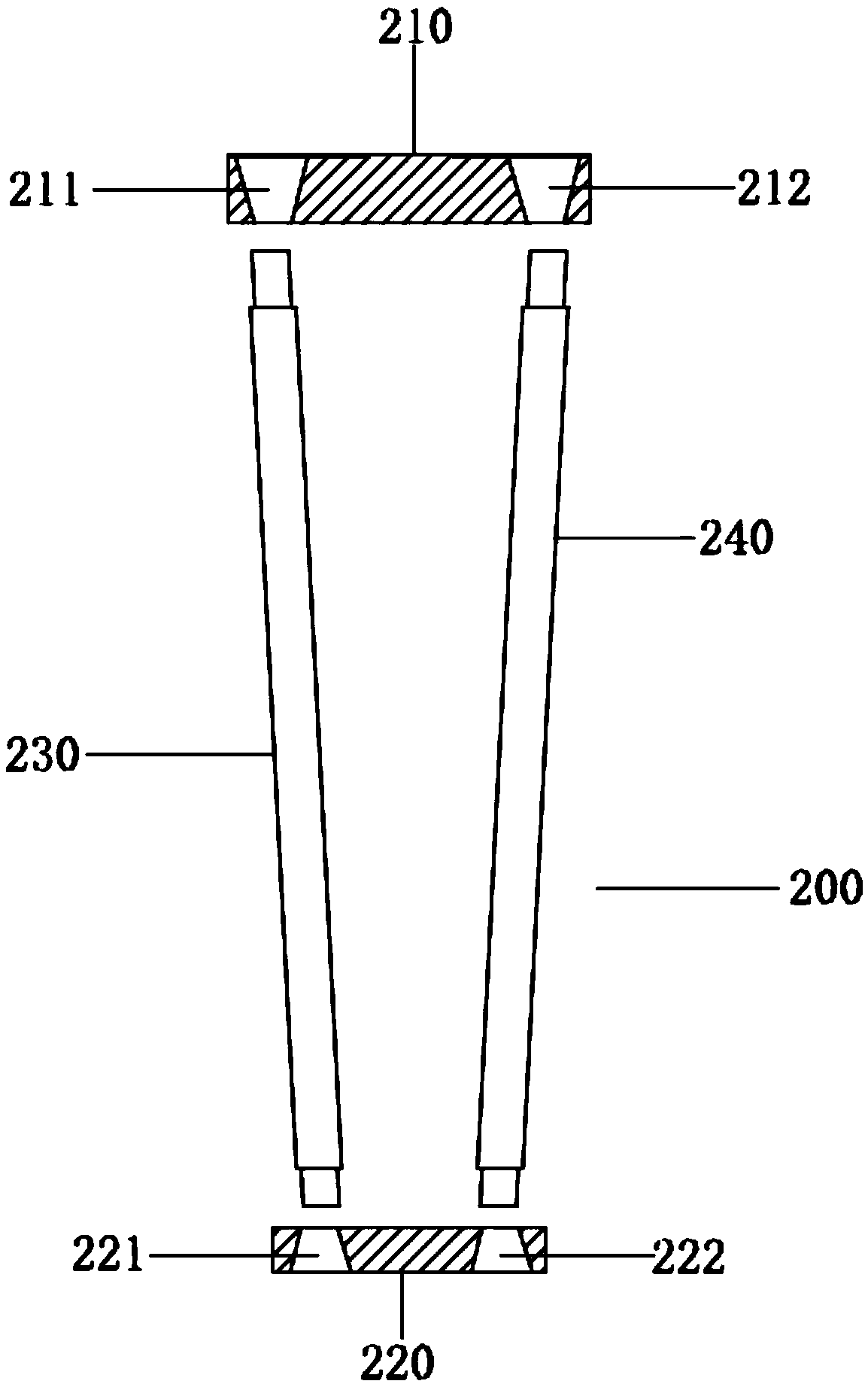
[0059] combine image 3 As shown, the lower arm mechanism 200 of this embodiment includes a first lower arm positioning plate 210, a second lower arm positioning plate 220, a first lower arm link 230 and a second lower arm link 240, the first lower arm positioning plate 210 and the second lower arm positioning plate 220 are arranged side by side opposite to each other, the first end of the first lower arm link 230 is swingably inserted on the first lower arm positioning plate 210, and the second end of the first lower arm link 230 is swingably inserted. Set on the second lower arm positioning plate 220, the first end of th...
Embodiment 2
[0083] This embodiment proposes a dummy for grappling training, including a torso prosthesis 700 and an arm 800 , and the arm 800 is set on the torso prosthesis 700 .
[0084] Such as Figure 12 As shown, the arm 800 of this embodiment is the dummy arm structure described in the first embodiment, and the two dummy arm structures are arranged on the torso prosthesis 700 one on the left and one on the right. Wherein, the specific structure of the dummy arm structure can directly refer to the relevant description in the first implementation, and will not be repeated this time.
[0085] The two arms 800 of the dummy for grasping training in this embodiment both adopt the dummy arm structure of Embodiment 1, and the left and right arms have the same structure and are symmetrically arranged on the torso prosthesis.
[0086] Of course, in other specific implementation manners, the dummy for grasping training can also use only one of the arms to adopt the dummy arm structure describe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More