

Error calibration method of uniaxial north seeker
An error calibration and north finder technology, applied in the field of inertial navigation, can solve the problems of incapable error model and calibration method calibration and compensation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
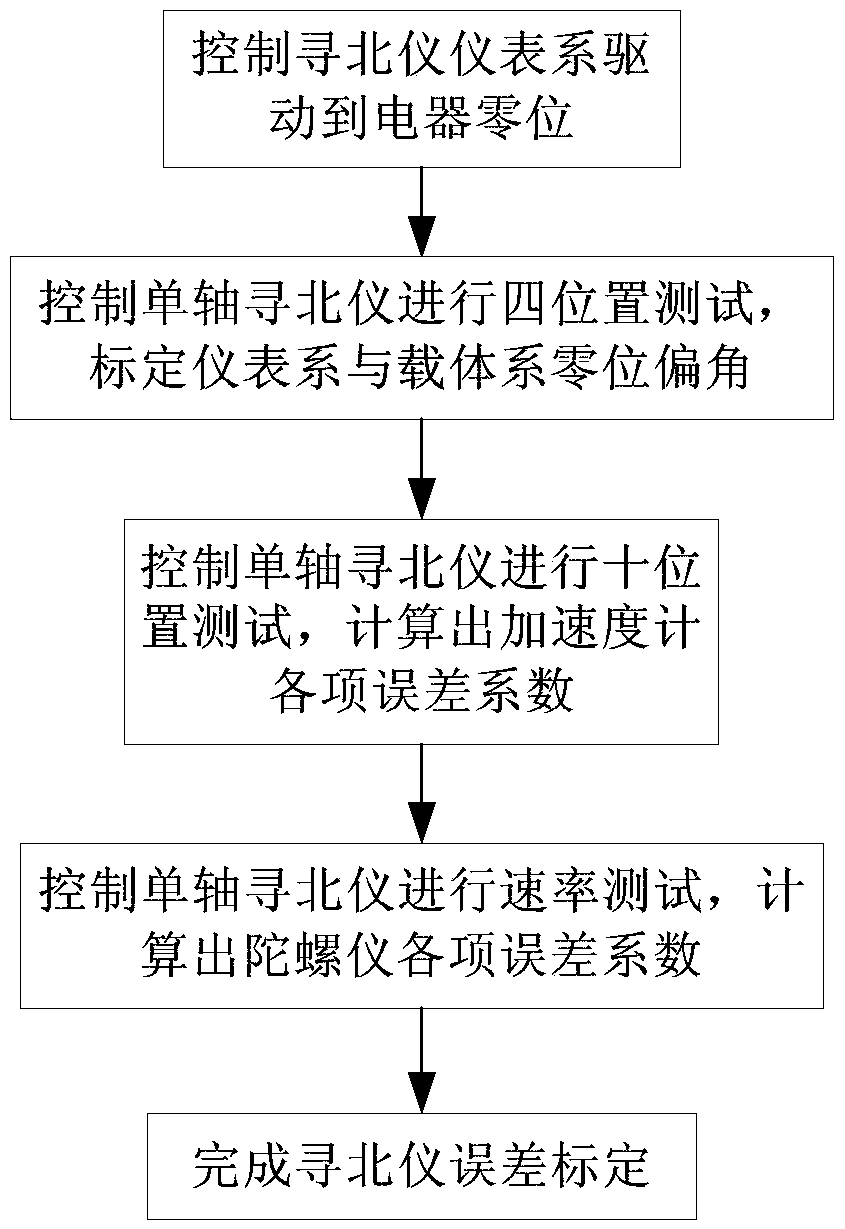
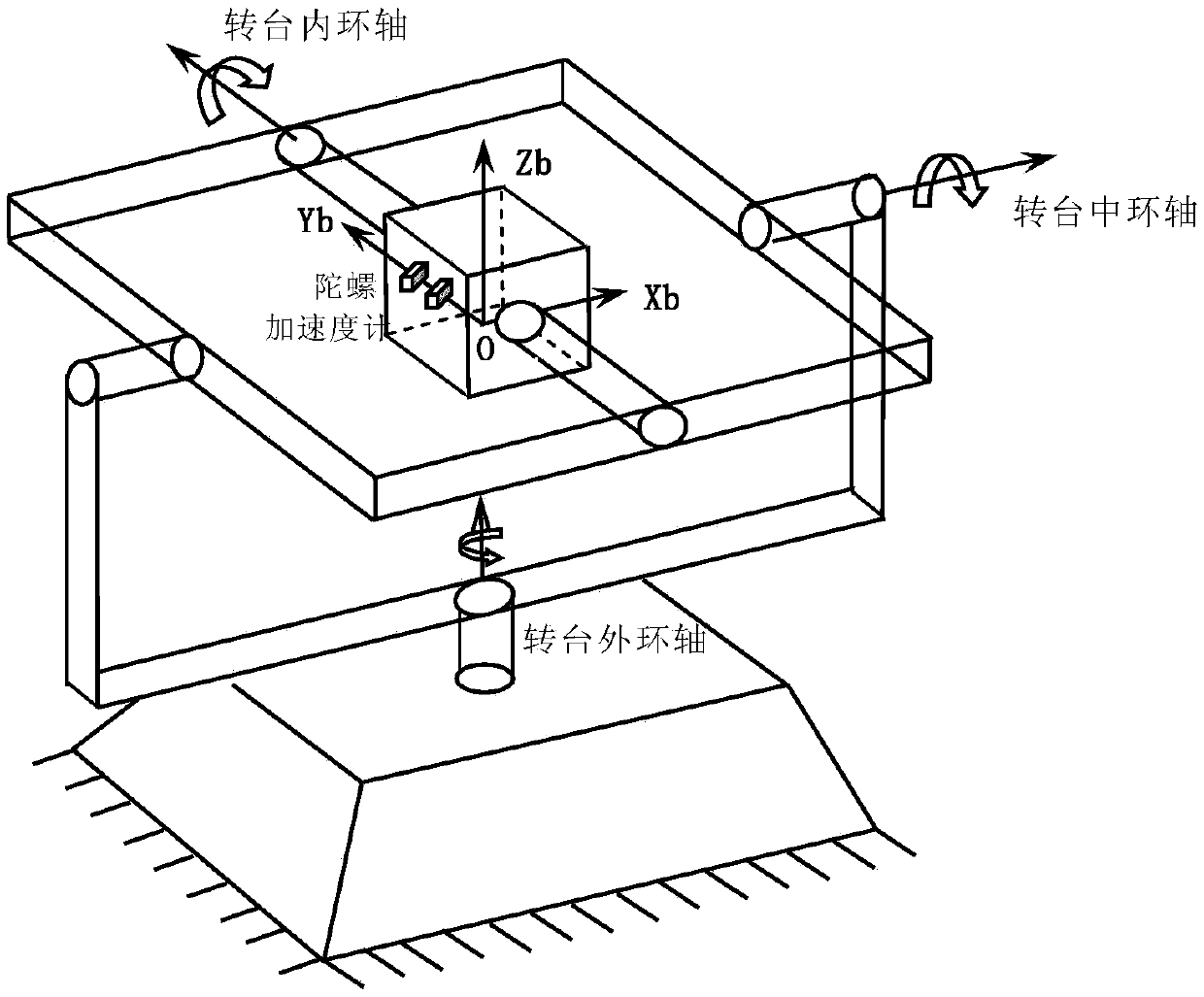
[0131] 1). Install the single-axis north finder on the turntable so that the load system coincides with each axis of the turntable. Start the north finder to control the OXYZ of the single-axis north finder to rotate around the OZ axis, so that the OY axis is locked at the zero position. Adjust the three-axis turntable to make the single-axis north finder system OX b Y b Z b Placed in 4 different positions, the average value of the pulse number of the sampling gyroscope at Δt=60s, as shown in Table 1.
[0132] Table 1 Four-position test sampling data
[0133]
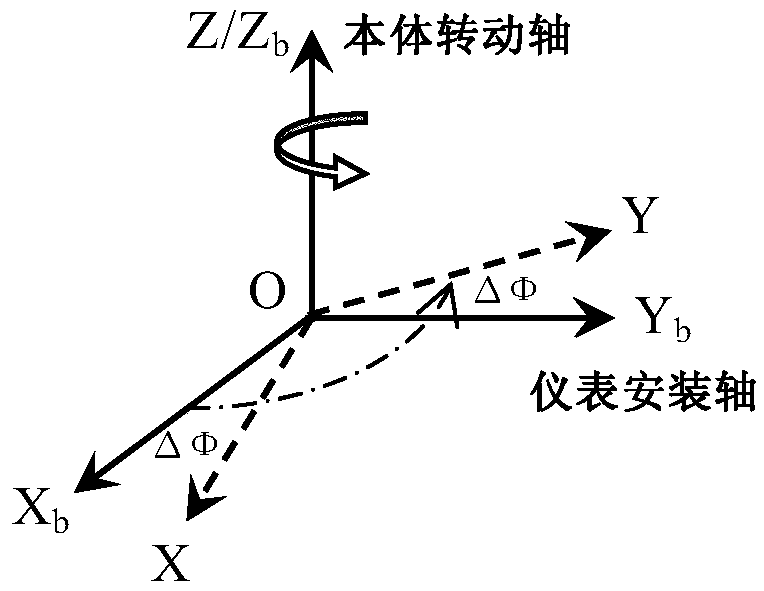
[0134] And calculate the instrument system OXYZ and carrier system OX b Y b Z b The zero deflection angle Δφ=23.441571°;
[0135] 2). Adjust the three-axis turntable so that the single-axis north finder instrument system OXYZ is statically placed in 10 different positions, and collect the pulse numbers of the gyroscope and accelerometer after Δt=60s, as shown in Table 2.
[0136] Table 2 Ten position test sampling data
[0137]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More