

Three-degree-of-freedom coaxial output mechanism
A technology with coaxial output and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in meeting high-speed and high-acceleration, large inertia of moving parts, and limitations of dynamic characteristics, and achieve simple structure and rotation. The effect of small inertia and relatively small size of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] In order to further understand the content, features and effects of the present invention, the following embodiments are given as examples, and detailed descriptions are as follows with accompanying drawings:
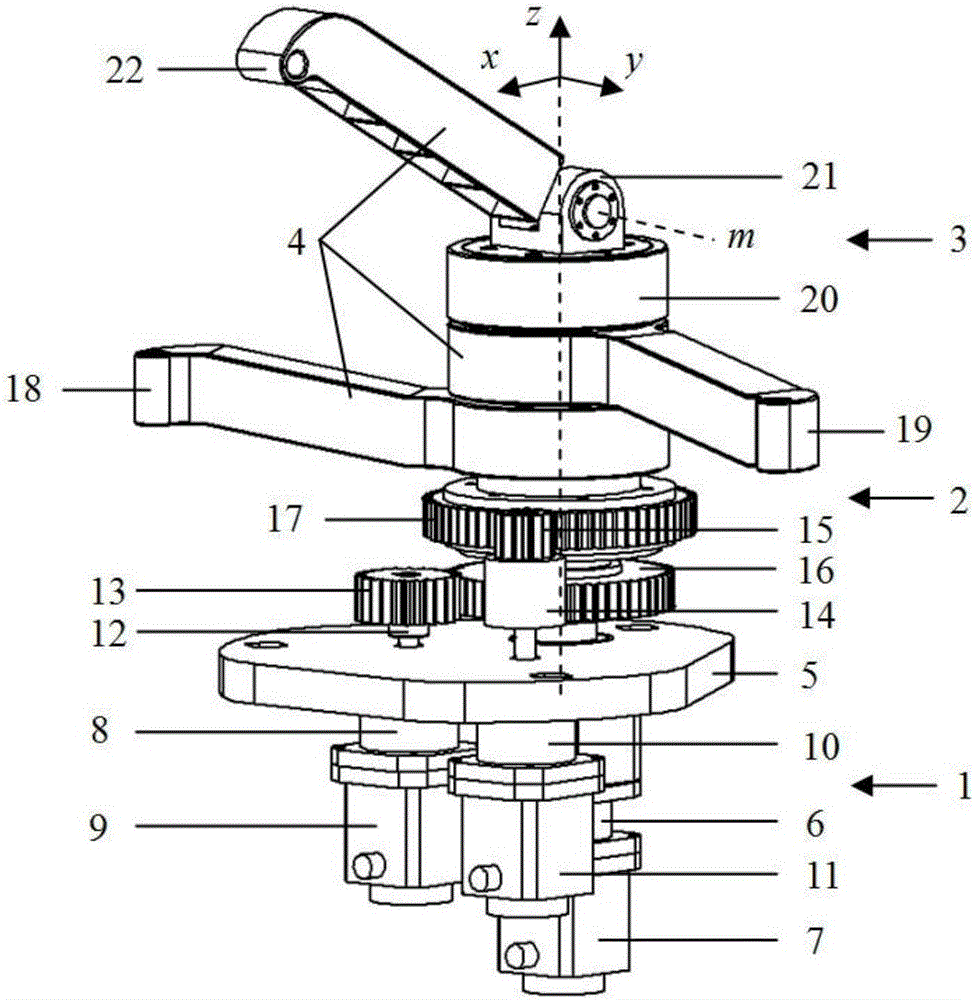
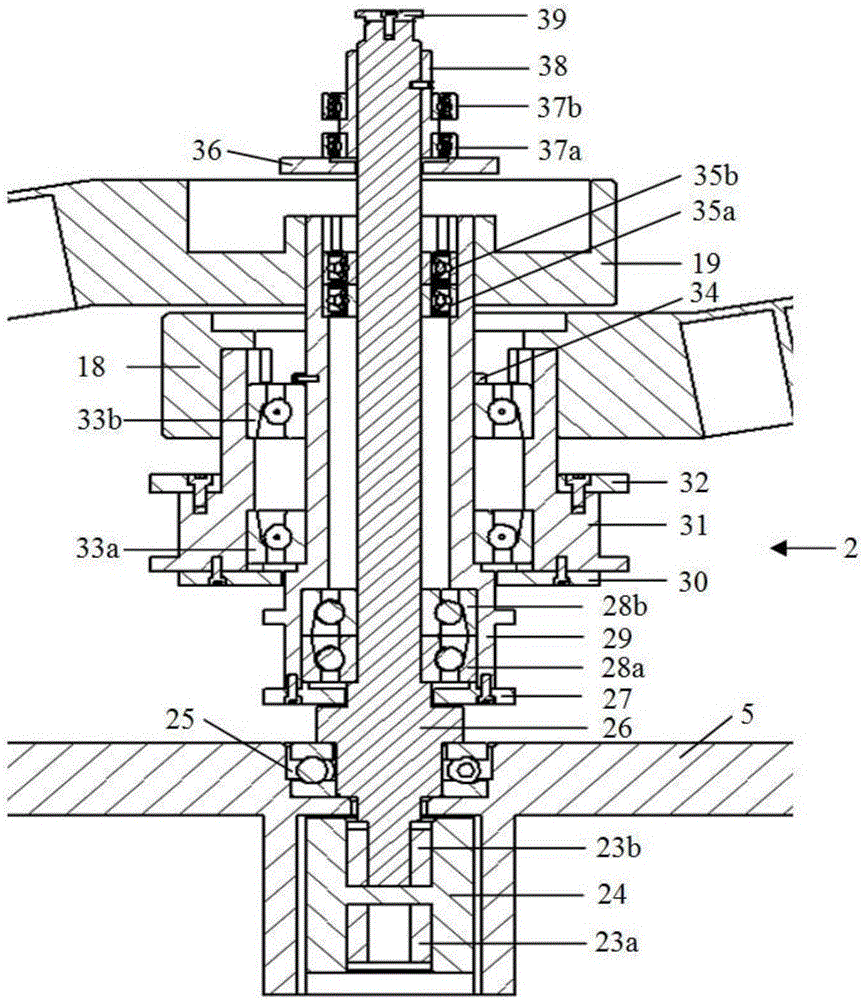
[0012] See Figure 1 ~ Figure 3 , A three-degree-of-freedom coaxial output mechanism, including a vertically arranged central transmission shaft 26, the central transmission shaft 26 is supported by a horizontally arranged base 5 and driven by a first motor 7.
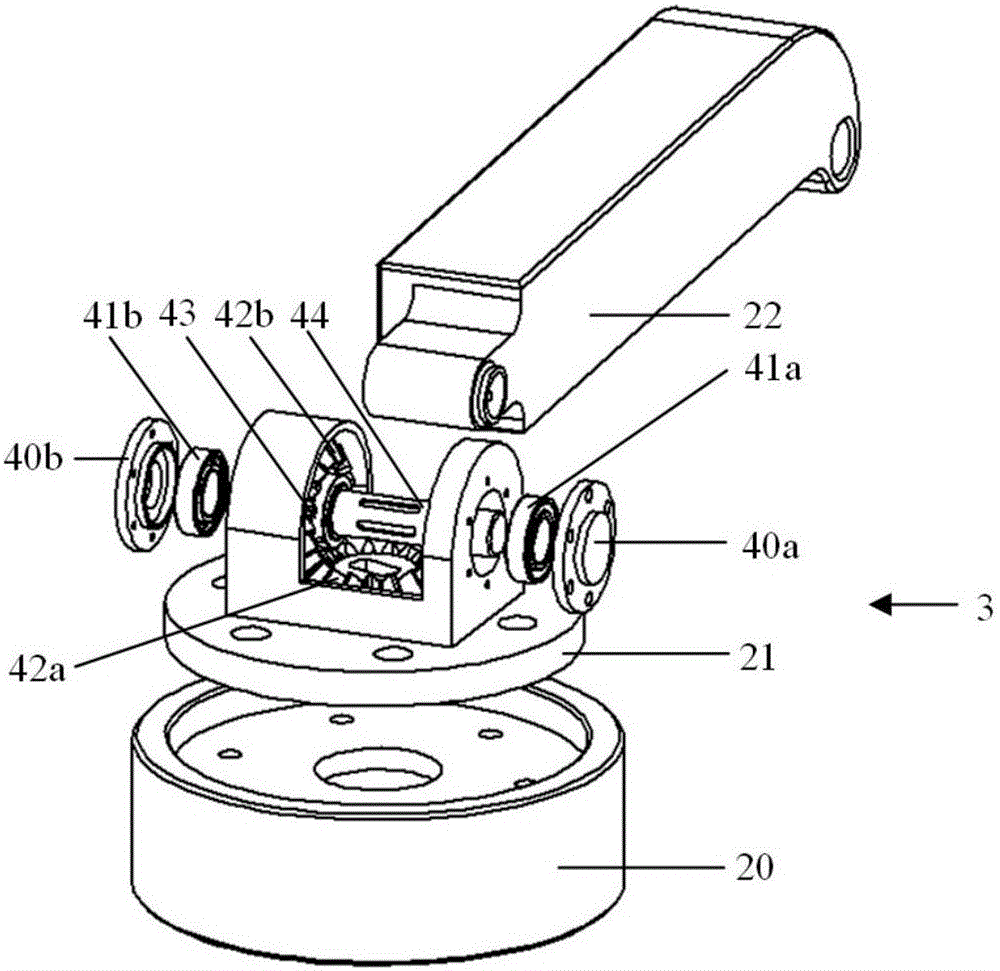
[0013] A first hollow shaft 29, a follower 20, and a driving bevel gear 42a are installed on the central transmission shaft 26. The first hollow shaft 29 and the follower 20 are axially fixed and circumferentially rotatably installed. On the central transmission shaft 26, the driving bevel gear 42a is fixedly mounted on the central transmission shaft 26; a bevel gear support 21 is fixedly mounted on the follower 20, and on the bevel gear support 21 A first driving arm rotation shaft 44 is supported. A driven b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More