Teleoperation system and teleoperation method of a mechanical arm
A technology of mechanical arm and operating system, applied in the field of robotics, can solve the problems of difficult remote operation of complex movements, single control process, unnatural human-computer interaction process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] Below in conjunction with accompanying drawing and specific embodiment, the present invention is described in further detail:
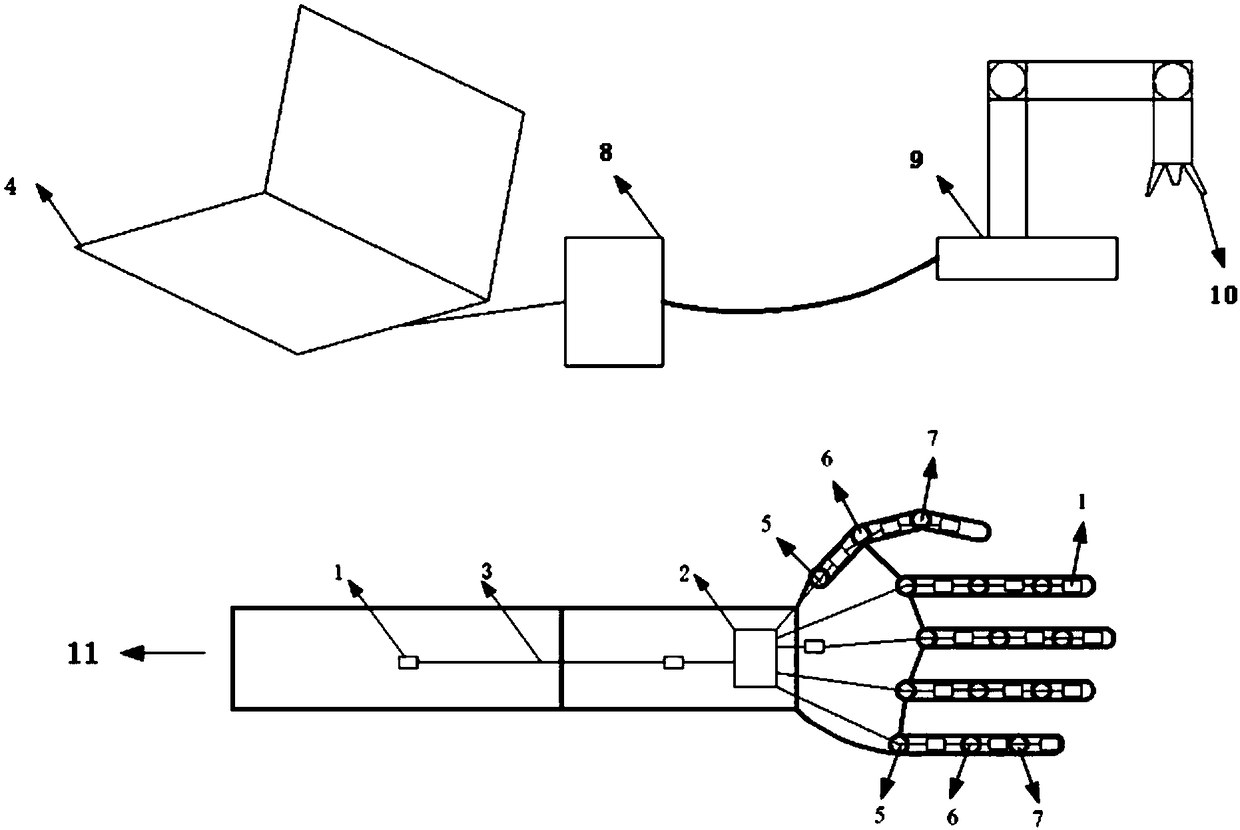
[0115] like figure 1 Shown is a schematic structural diagram of the robotic arm teleoperating system of the present invention. It can be seen from the figure that the robotic arm teleoperating system of the present invention includes a data glove 11, a data processing and display unit 4, a robotic arm control unit 8, a robotic arm 9 and a robotic arm 10, wherein:
[0116] The data glove 11 includes a plurality of sensors 1 and a microprocessor 2, and the plurality of sensors 1 are respectively arranged between the upper arm, the lower arm, the back of the hand and each joint of each finger of the human body, and are used to collect motion information of different parts of the upper limbs of the human body. The microprocessor 2 is arranged on the wrist of the human body and is used to receive motion information from the sensor 1 and send the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com