Self-balance wheelbarrow with gravity center self-adjusting function
A unicycle, self-adjusting technology, applied in the direction of bicycles, unicycles, motor vehicles, etc., can solve the problems of unstable center of gravity, affecting the service life of the motor, falling, etc., and achieve the effect of reducing force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
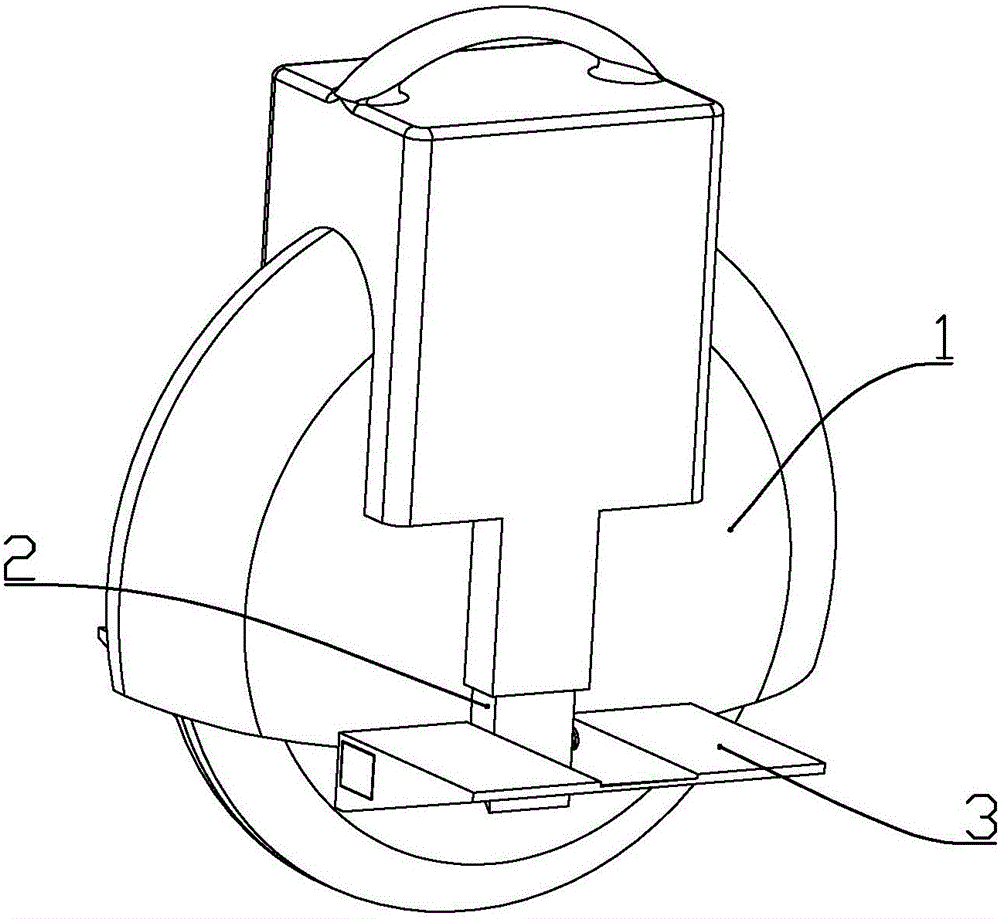
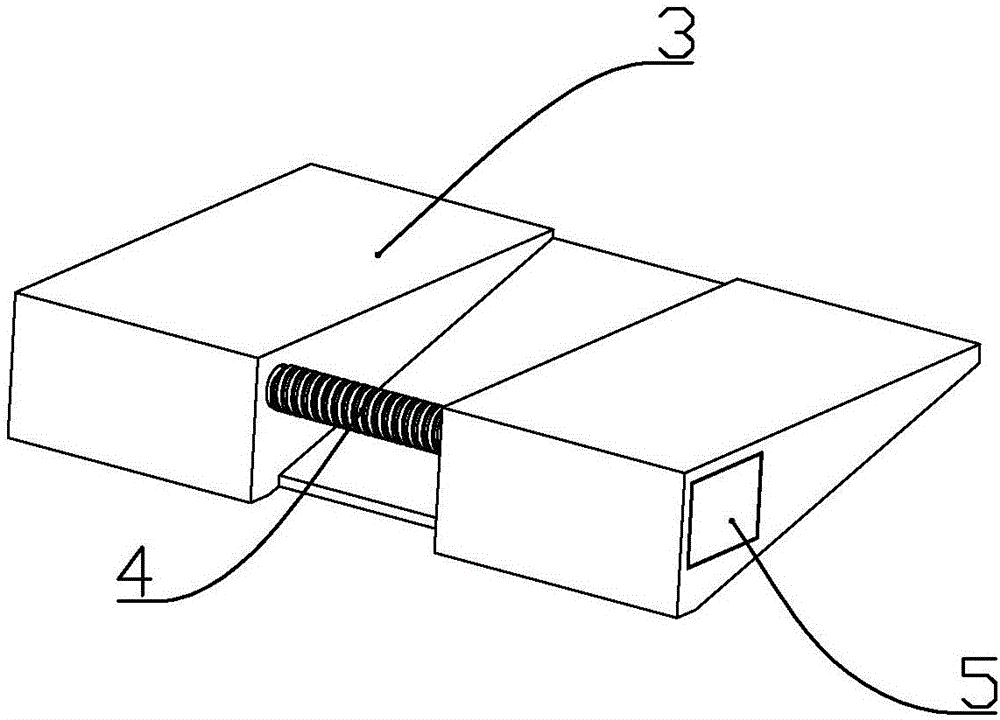
[0016] according to figure 1 and figure 2 As shown, a self-balancing unicycle with a self-adjusting function of the center of gravity described in this embodiment includes a car body 1 and two pedals 3 installed on the mounting columns 2 on both sides of the car body, and the pedals are rotatably connected with A screw mandrel 4, a motor 5 for driving the screw mandrel to rotate is installed in the pedal, and the screw mandrel is connected with the mounting column through a screw drive; the motor is electrically connected with the controller of the wheelbarrow, and when the speed of the wheelbarrow is lower than When the speed of the unicycle is higher than 12 km / h, the motor drives the screw to rotate forward to make the pedals move forward in the direction of travel of the unicycle.
[0017] A notch is formed in the middle of the pedal, and the width of the notch is 20-50mm larger than the width of the mounting column, that is, the range of the front and rear movement of t...
Embodiment 2
[0023] A self-balancing unicycle with a self-adjusting function of the center of gravity described in this embodiment includes a car body 1 and two pedals 3 installed on the mounting columns 2 on both sides of the car body, and a screw rod is rotatably connected to the pedals 4. A motor 5 for driving the screw to rotate is installed in the pedal, and the screw is connected to the mounting column through a screw drive; The switch that is electrically connected to the controller is used to switch the control mode of the controller; when the switch is in the first state, the control mode is the same as in Embodiment 1, that is, when the speed of the wheelbarrow is lower than 5km / h, the motor drives the screw to move forward Rotate to make the pedal move forward in the direction of the unicycle. When the speed of the unicycle is higher than 12km / h, the motor drives the screw to rotate in the opposite direction to make the pedal move backward in the direction of the unicycle; when t...
Embodiment 3
[0026] A self-balancing unicycle with a self-adjusting function of the center of gravity described in this embodiment includes a car body 1 and two pedals 3 installed on the mounting columns 2 on both sides of the car body, and a connecting shaft is rotatably connected to the pedals , the middle part of the connecting shaft passes through the mounting column and is fixedly connected to the mounting column by screws, a linear reciprocating motor is fixedly installed at one end of the pedal, the output shaft of the linear reciprocating motor is coaxially connected with the connecting shaft, and the control of the linear reciprocating motor and the wheelbarrow When the speed of the unicycle is lower than 5km / h, the linear reciprocating motor drives the pedal to move forward in the direction of the unicycle; when the speed of the unicycle is higher than 12km / h, the linear reciprocating motor drives the pedal to move backward in the direction of the unicycle.
[0027] Specifically, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More